


聊一聊全景图

© Young 2017-10-12 11:24
Welcome to My GitHub
前段时间学习了ThreeJS项目里边关于全景图的案例之后,自己动手练习了一下,实现了两个全景图的例子,分别如下:
CanvasRender 立方体全景图可能是因为浮点数计算精度的原因导致每个面的衔接处有灰色间隙;
WebGLRender 球型全景图由于贴图的原因导致南北极存在扭曲的情况,通过把球型全景图转换成立方体全景图可以改善这个问题,但是不能完全避免;
网络不好的情况下第一次打开可能会比较慢,因为全景图资源比较大。
实现原理比较简单,只要把摄像机放在模型中心,然后把全景图渲染到模型内表面即可;
不过还是需要注意以下
两点
:
其一
有
两种
方法可以把全景图渲染到模型内表面;
一种是在创建材质时设置side参数为THREE.BackSide;


另一种种则是对模型进行镜像变换;

其二
球型全景图和立方体全景图使用的图片资源是有区别的;
球型全景图如下:


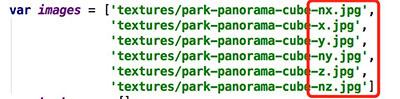
立方体全景图如下:


虽然球型全景图更贴近人眼的构建模式,但是从模型上来说比立方体更复杂,而且出于兼容性考虑使用CSSRender时是无法构建球模型的,
因此立方体全景图具有更高的性能和更好的兼容性。
根据自己搜到的相关知识并加以理解最终用WebGL实现了 球型全景图转立方体全景图工具 。
点击上述链接应该会看到该程序根据一张球型全景图生成了一张正方形图片即立方体全景图的一个面;
该工具核心代码如下:
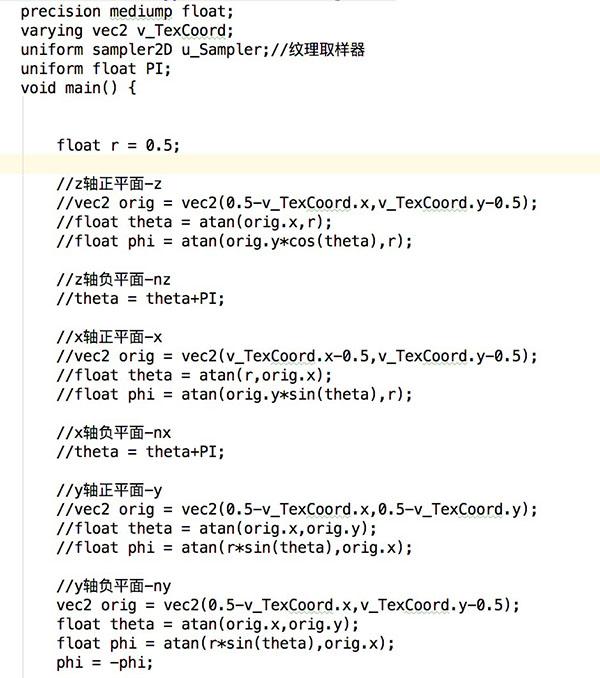
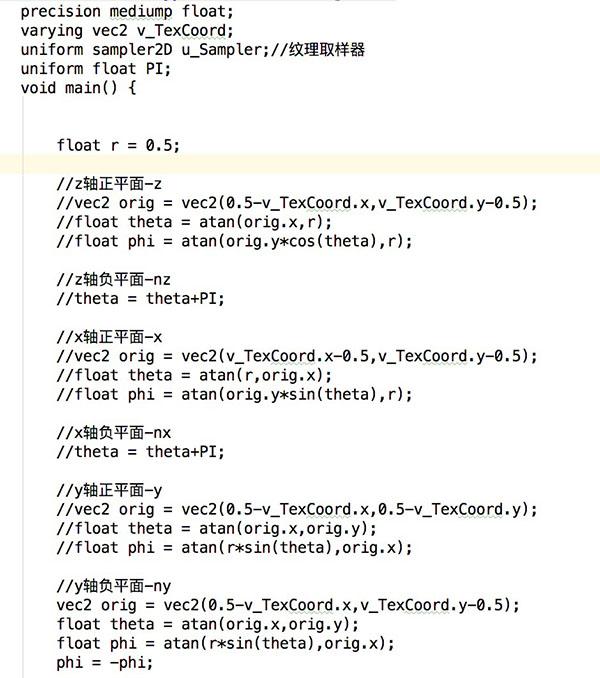

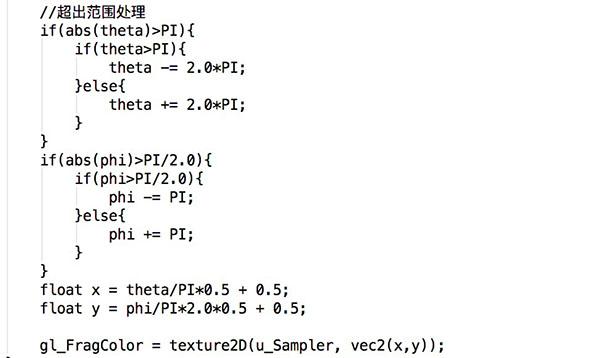
该工具每次只能得到立方体的一个面,图中
y轴负平面
没有被注释得到了执行,因此得到是
y轴负平面
也就是立方体的底面,要想得到其它平面,只需要执行相关平面代码即可。
最终得到的六个面后,对应相关命名代入
立方体全景图
例子中的图片数组即可得到立方体全景图了。
如果你还有兴趣了解该工具的实现,可以接着往下看;
虽然上边的核心代码很简单每个面大概三四行代码的样子,其实球型全景图到立方体全景图的转换涉及到好几个坐标系的相互映射,稍不小心就会出错,如下:
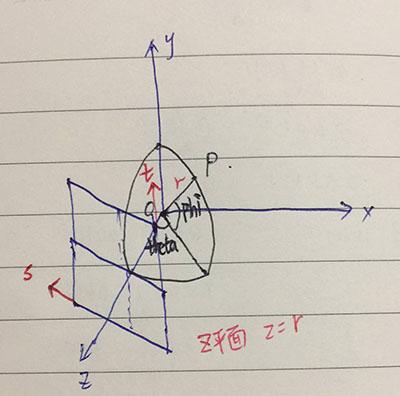
坐标系说明:
xyz坐标系
是全景场景中的坐标系;
st坐标系
是立方体单个平面的纹理坐标系。
WebGL中的纹理坐标系统是二维的,为了将纹理坐标和广泛使用的x坐标和y坐标区分开来,使用s和t命名,称之为st坐标系统。
假设
点P
是从球面和
Z轴
的交点绕
Y轴
旋转
theta
,然后在
Y轴
和其本身组成的平面上绕其过原点的法向量旋转
phi
得到,那么
点P
的坐标如下:
P(x,y,z);
x = r*cos(phi)*sin(theta);
y = r*sin(phi);
z = r*cos(phi)*cos(theta);
因为立方体的六个面都和球面相切,那么假设上图中的
OP直线
和正方体的某个面相交于
点Q
,那么
OQ向量
肯定等于
m
乘以
OP向量
,那么
点Q
的坐标如下:
OQ = m*OP;
Q(x1,y1,z1);
x1 = m*x = m*r*cos(phi)*sin(theta);
y1 = m*y = m*r*sin(phi);
z1 = m*z = m*r*cos(phi)*cos(theta);
如果
点Q
在立方体的
Z平面
上;
z1 = r = m*r*cos(phi)*cos(theta);
m*cos(phi)*cos(theta) = 1;
m*sin(phi) = 1/cos(theta)*tan(phi);
m*cos(phi)*sin(theta) = 1/tan(theta);
x1 = r/tan(theta);
y1 = r/cos(theta)*tan(phi);
Q(r/tan(theta),r/cos(theta)*tan(phi),r);
此时得到了
点Q
在
xyz坐标系
中的坐标,再假设
点Q
在
st坐标系
中的坐标为
(s0,t0)
,那么就可以求得
theta
和
phi
的值;
//WebGL纹理坐标最大为1,因此r = 0.5
float r = 0.5;