import cv2
cap = cv2.VideoCapture(1)
if False == cap.isOpened():
print(0)
else:
print(1)
以上代码中,如果调用成功,返回 1 , 如果调用失败,返回 0;
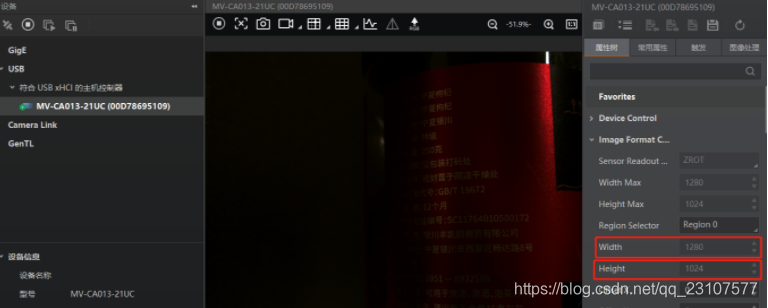
2.设置获取图像的大小和帧率
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1024)
cap.set(cv2.CAP_PROP_FPS , 15)
因为directshow 获取到的图像大小均为 640X480 大小,所以需要我们自行设定图像大小
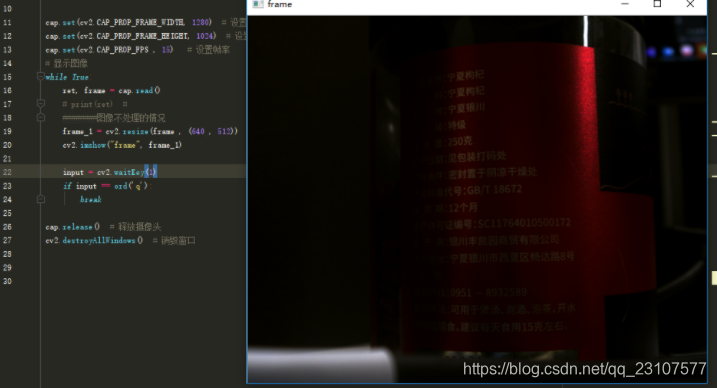
3.图像获取与显示
while True:
ret, frame = cap.read()
frame_1 = cv2.resize(frame , (640 , 512))
cv2.imshow("frame", frame_1)
input = cv2.waitKey(1)
if input == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
4.效果展示
5.完整代码:
import cv2
cap = cv2.VideoCapture(1)
if False == cap.isOpened():
print(0)
else:
print(1)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1024)
cap.set(cv2.CAP_PROP_FPS , 15)
while True:
ret, frame = cap.read()
frame_1 = cv2.resize(frame , (640 , 512))
cv2.imshow("frame", frame_1)
input = cv2.waitKey(1)
if input == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
如上整个过程,即可完成使用 cv2.VideoCapture()接口对海康工业相机的调用,并通过 opencv 接口对图像数据进行显示!!!
个人认为,这个方法是有局限性的
1.多相机的使用,这个方法是没有办法控制区分相机的,可能也无法使用多相机
2.相机大部分参数,都无法通过接口设置
3.相机的特殊功能,例如事件、水印等功能,均无法正常使用
4.异常问题排查时,第三方接口,无法排查问题
文章转载:python语言下使用opencv接口cv2.VideoCapture()接口调用海康机器人工业相机一、Opencv接口使用 opencv 的官方接口 VideoCapture() 接口直接调用海康工业相机,接下来简单介绍下 VideoCapture() 这个接口接口:cv2.VideoCapture()作用:获取本地目录下的视频文件或者使用本电脑的摄像头获取实时数据;本文需要使用该接口调用海康工业相机;参数:参数写入 “0” ,调用的是本地电脑摄像头参数写入 “1” ,调用的
linux版本环境比较麻烦,要注意自己的硬件系统是x86还是ARM等等,
我个人是ubuntu18
https://www.hikrobotics.com/cn/machinevision/service/download?module=0在海康官方下载其linux版本的MVS,下载完成后有很多版本的,根据自己电脑是x86或者arm来选择解压,同时在其中文文档中根据要求需要配置好环境变量!!!
文件夹中的海康文档给出了命令行
可以在终端中输入export查看环境变量是否导入了路径
第一次添加环境变量后需要重启(这点可能因人而异)
压缩包中有两个文件夹
一个是直接运行的脚本
一个是封装成类
根据需要自取,运行hik2cv.py即可
海康的摄像头是用rtsp网口通信的,只要调用opencv的videocapture类即可,里面包含网口的通信协议,具体的协议为:“rtsp://用户名:密码@ip地址/h264/ch1/main/av_stream”
需要注意的一点是,当你知道了海康的ip地址后,需要将你电脑的ip地址改为和它同一个网段即可,以我的为例,我的摄像头ip是192.168.1.64,那么我的本地ip就改为192.168.1.63,这样便可以达成局域网的效果。。。
#include <opencv2\opencv.hpp&g
您好!OpenCV是一个开源的计算机视觉库,可以用于图像处理和分析。它支持多种平台和编程语言,并提供了丰富的功能和算法。
要通过海康机器人工业相机使用OpenCV,您可以按照以下步骤进行操作:
1. 首先,确保您已经安装了OpenCV库。您可以通过官方网站(https://opencv.org/)下载适合您操作系统的版本,并按照安装指南进行安装。
2. 连接海康机器人工业相机到计算机。这通常需要使用相机的USB、Ethernet或者其他接口进行连接。
3. 使用OpenCV的VideoCapture类来访问相机。您可以创建一个VideoCapture对象,并指定相机的设备索引或者视频文件路径作为参数。例如,如果相机被识别为设备索引0,您可以使用以下代码创建一个VideoCapture对象:
```cpp
#include <opencv2/opencv.hpp>
int main()
cv::VideoCapture cap(0); // 使用设备索引0访问相机
if (!cap.isOpened())
std::cout << "无法打开相机" << std::endl;
return -1;
// 在这里可以使用OpenCV的其他功能处理相机的帧数据
return 0;
4. 使用OpenCV的其他功能来处理相机的帧数据。您可以使用VideoCapture对象的read()方法来获取相机的帧数据,并使用其他OpenCV函数进行图像处理、分析等操作。
这只是使用OpenCV通过海康机器人工业相机的基本流程,具体的操作可能因机器人相机型号和OpenCV版本而有所差异。您可以参考OpenCV的文档和海康机器人相机的官方文档来获取更详细的使用方法和示例代码。希望对您有所帮助!如有更多问题,请随时提问。