

人工智能:百度文心一言4.0会员版实测编程写代码能力

刚打开百度文心一言,看到4.0出来了,就充值了一个玩玩。以前是3.5版本的。3.5版本感觉不如chatgpt 3.5好用,测试一下4.0版的百度文心一言。


用我以前写的一人工智能代码,来测试一下试试
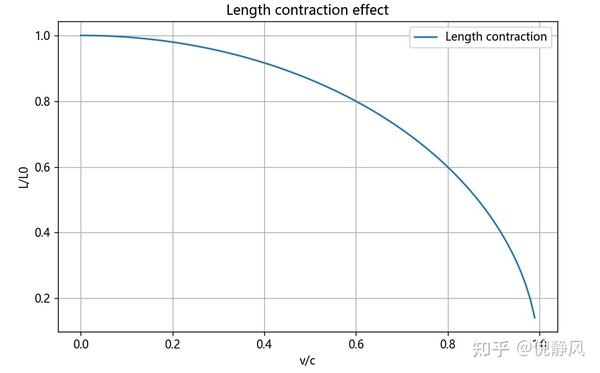
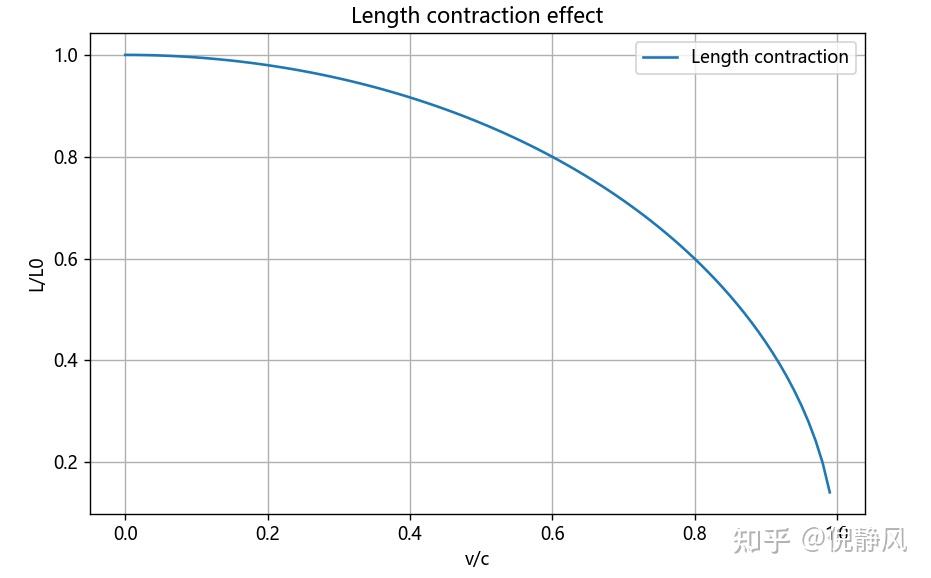
一、计算相对论光缩尺寸
提示词:使用numpy写一个相对论的尺缩效应函数,并做图
结果
import numpy as np
import matplotlib.pyplot as plt
# 光速 (m/s)
c = 299792458
# 静止时的长度 (m)
L0 = 1
def length_contraction(v):
"""计算尺缩效应下的长度"""
return L0 * np.sqrt(1 - (v**2) / (c**2))
# 速度范围 (m/s)
v_range = np.linspace(0, 0.9 * c, 100)
# 计算在各个速度下的长度
contracted_lengths = length_contraction(v_range)
plt.figure(figsize=(8, 5))
plt.plot(v_range / c, contracted_lengths / L0, label="Length contraction")
plt.xlabel("v/c")
plt.ylabel("L/L0")
plt.title("Length contraction effect")
plt.legend()
plt.grid(True)
plt.show()运行效果
二、复变函数保角映射
提示词:写一个Python程序,实现复变函数的保角映射,需要画出图形,写出实例程序
结果
import numpy as np
import matplotlib.pyplot as plt
# 定义复变函数
def f(z):
return (z - 1) / (z + 1)
# 定义网格坐标
x = np.linspace(-2, 2, 100)
y = np.linspace(-2, 2, 100)
X, Y = np.meshgrid(x, y)
# 计算复平面上的点
Z = X + 1j * Y
# 计算保角映射后的点
W = f(Z)
# 计算映射后的坐标
u = np.real(W)
v = np.imag(W)
# 绘制原复平面上的网格
plt.figure(figsize=(10, 5))
plt.subplot(121)
plt.title('Original Complex Plane')
plt.xlabel('Re(z)')
plt.ylabel('Im(z)')
plt.grid(True)
plt.axis('equal')
# 绘制映射后的图形
plt.subplot(122)
plt.title('Conformal Mapping')
plt.xlabel('Re(w)')
plt.ylabel('Im(w)')
plt.quiver(X, Y, u, v, color='r', units='xy', scale=1)
plt.grid(True)
plt.axis('equal')
# 显示图形
plt.tight_layout()
plt.show()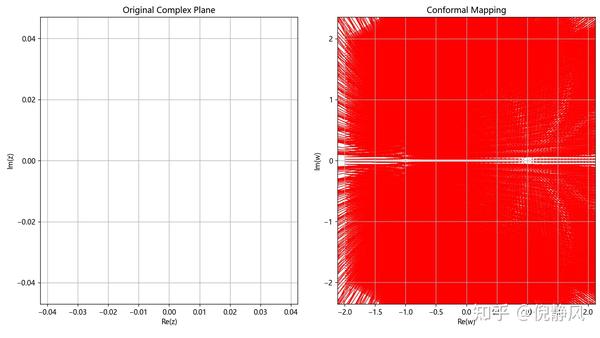
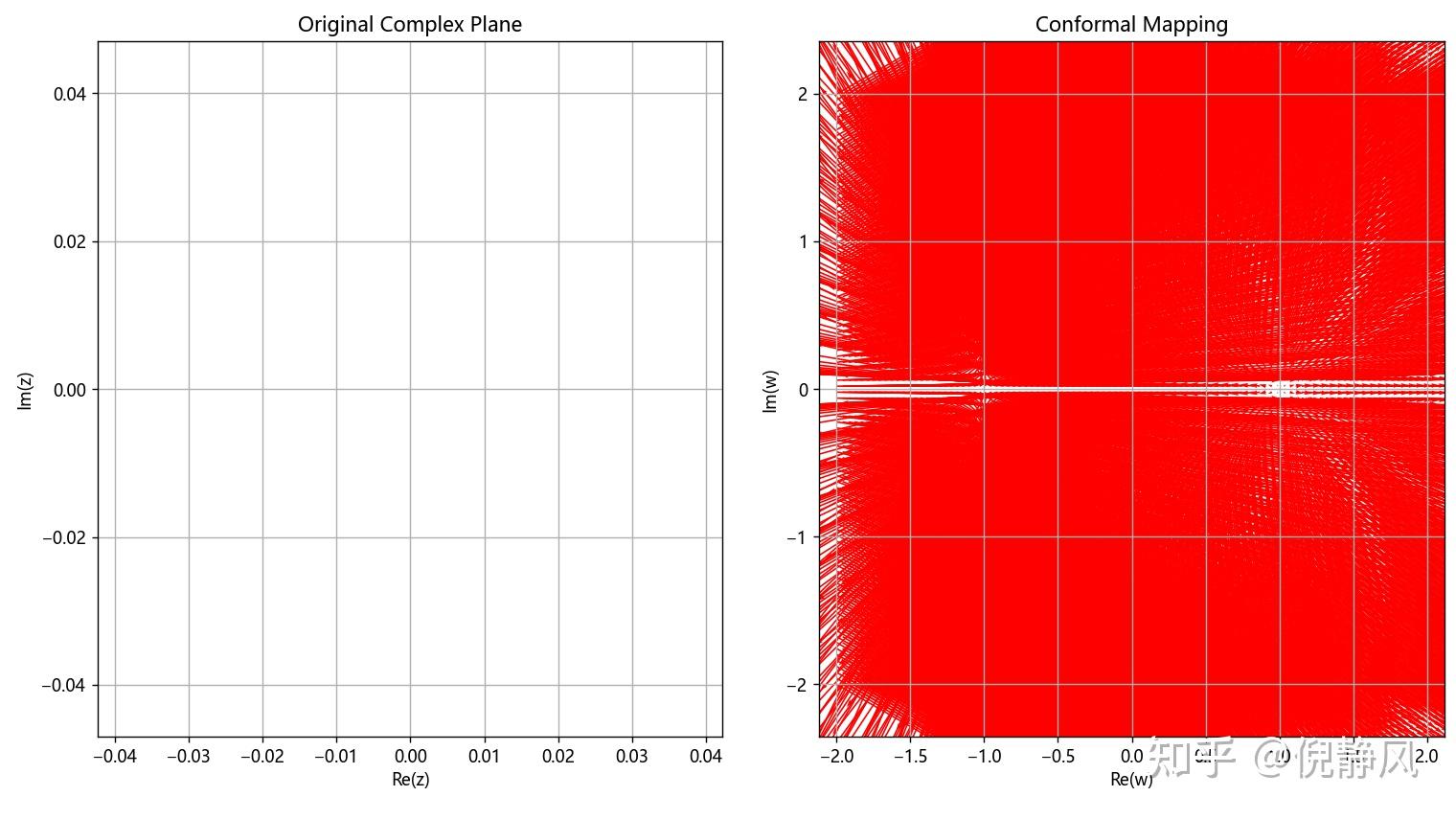
这个能运行,还不错,以前的出现复杂的3.5版的,好多不能运行。
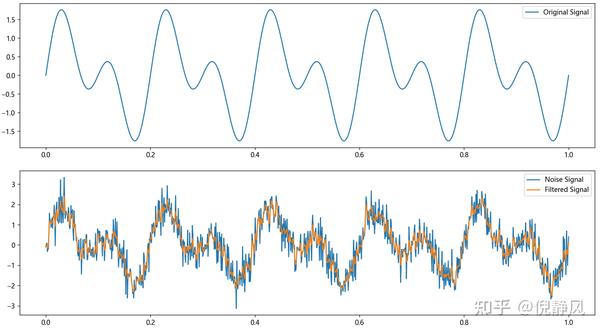
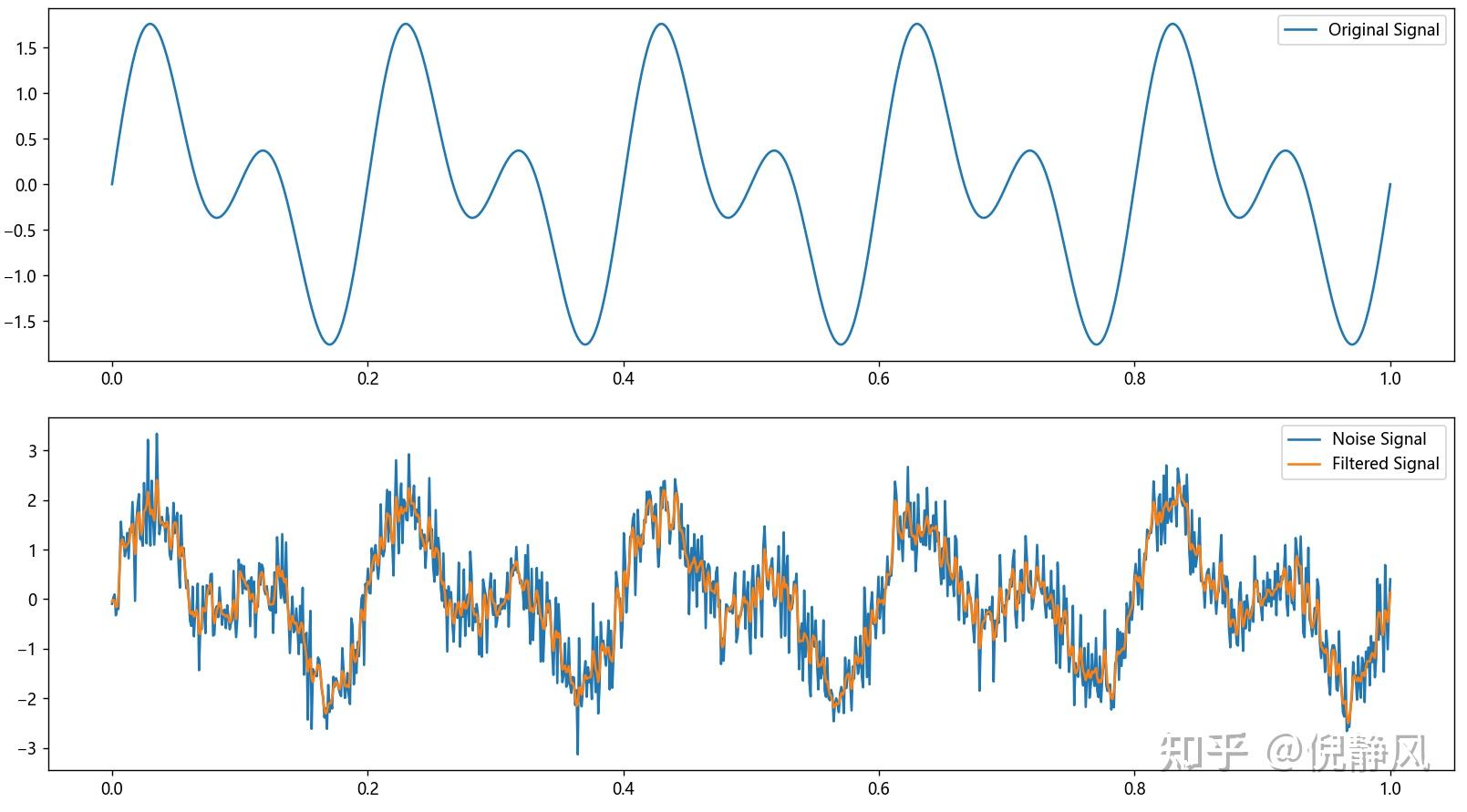
三、根据要求写高斯滤波程序
提示词:
使用python写一个高斯滤波程序,画图显示:原始信号,噪声信号,处理后信号,比较初始信号和处理后信号。我的信号程序定义如下:
# 生成原始信号 t = np.linspace(0, 1, 1000)
#x = np.sin(2 * np.pi * 10 * t) + np.sin(2 * np.pi * 20 * t)
x_initi = np.sin(2 * np.pi * 5 * t) + np.sin(2 * np.pi * 10 * t)
x = np.sin(2 * np.pi * 5 * t) + np.sin(2 * np.pi * 10 * t) + np.random.normal(0, 0.2, len(t))
# 加入噪声
noise = np.random.normal(0, 0.5, len(x)) x_noise = x + noise结果:
import numpy as np
import matplotlib.pyplot as plt
from scipy.ndimage import gaussian_filter
# 生成原始信号
t = np.linspace(0, 1, 1000)
x_initi = np.sin(2 * np.pi * 5 * t) + np.sin(2 * np.pi * 10 * t)
# 加入噪声
x = np.sin(2 * np.pi * 5 * t) + np.sin(2 * np.pi * 10 * t) + np.random.normal(0, 0.2, len(t))
noise = np.random.normal(0, 0.5, len(x))
x_noise = x + noise
# 使用高斯滤波器处理噪声信号
sigma = 1 # 你可以根据需要调整sigma的值
x_filtered = gaussian_filter(x_noise, sigma)
plt.figure(figsize=(10, 6))
# 绘制原始信号
plt.subplot(2, 1, 1)
plt.plot(t, x_initi, label='Original Signal')
plt.legend()
# 绘制噪声信号和处理后的信号
plt.subplot(2, 1, 2)
plt.plot(t, x_noise, label='Noise Signal')
plt.plot(t, x_filtered, label='Filtered Signal')
plt.legend()
plt.tight_layout()
plt.show()结果
四、使用三维显示随机游走
提示词:使用python写一个3维显示的2D随机游走程序,并显示出来
生成代码结果:
import matplotlib.pyplot as plt
import numpy as np
def random_walk_2d(n_steps):
# 初始化位置
position = [0, 0]
# 存储游走路径
path = [[0, 0]]
for _ in range(n_steps):
# 随机选择方向:上、下、左、右
direction = np.random.choice([-1, 1], size=2)
# 更新位置
position = [position[0] + direction[0], position[1] + direction[1]]
# 将新位置添加到路径中
path.append(position)
return path
def plot_random_walk(path):
# 绘制游走路径
plt.figure(figsize=(8, 8))
plt.scatter(*zip(*path), c=range(len(path)), cmap='viridis')
plt.plot(*zip(*path), color='black', linewidth=0.5)
plt.xlabel('X')
plt.ylabel('Y')
plt.title('2D Random Walk')
plt.show()
if __name__ == '__main__':
n_steps = 1000 # 设置游走步数
path = random_walk_2d(n_steps)
plot_random_walk(path)结果:
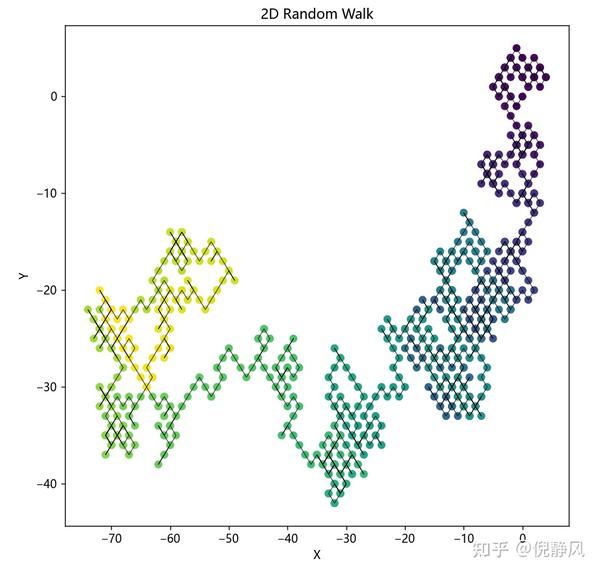
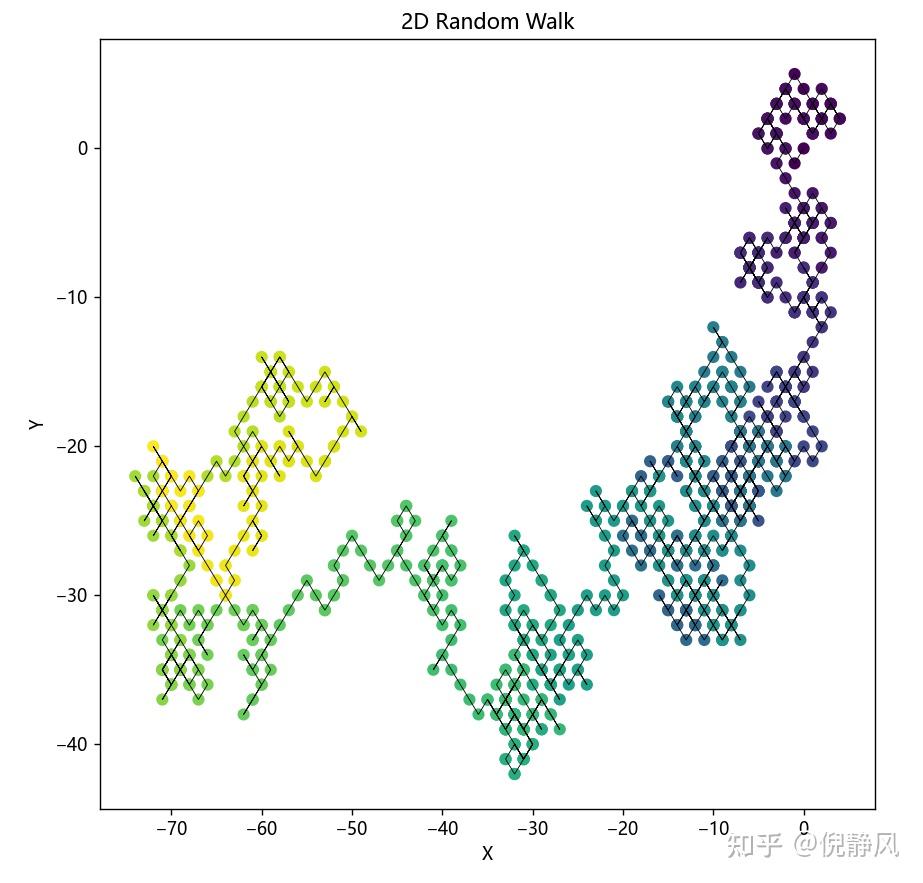
结果能运行,但问题是没有使用3D函数来表示。
追加了一个提示词:把上面的程序改成在3维中显示
结果:
import matplotlib.pyplot as plt
import numpy as np
def random_walk_3d(n_steps):
# 初始化位置
position = [0, 0, 0]
# 存储游走路径
path = [[0, 0, 0]]
for _ in range(n_steps):
# 随机选择方向:上、下、左、右、前、后
direction = np.random.choice([-1, 1], size=3)
# 更新位置
position = [position[0] + direction[0], position[1] + direction[1], position[2] + direction[2]]
# 将新位置添加到路径中
path.append(position)
return path
def plot_random_walk_3d(path):
# 绘制游走路径
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(*zip(*path), c=range(len(path)), cmap='viridis')
ax.plot(*zip(*path), color='black', linewidth=0.5)
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
ax.set_title('3D Random Walk')
plt.show()
if __name__ == '__main__':
n_steps = 1000 # 设置游走步数
path = random_walk_3d(n_steps)
plot_random_walk_3d(path)
显示结果
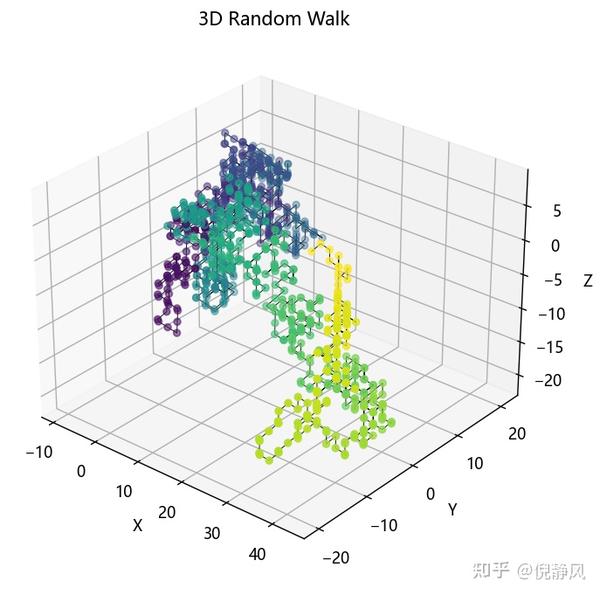
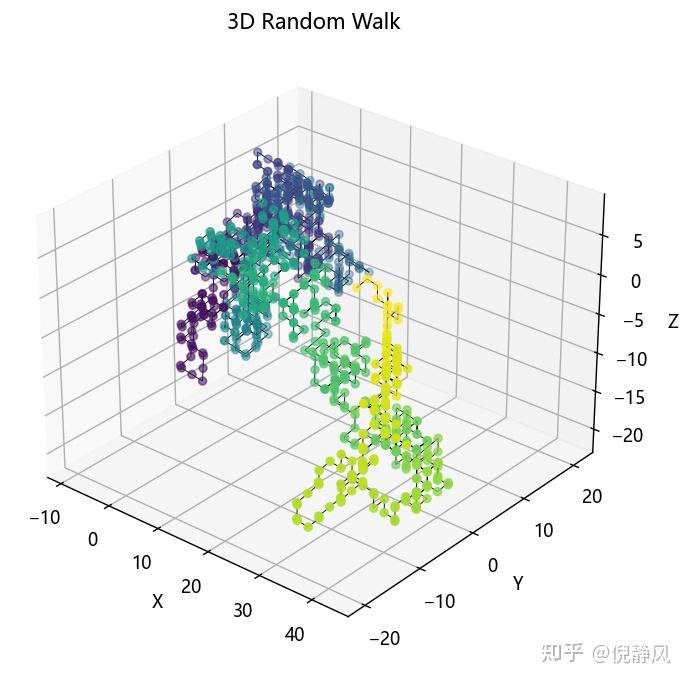
可见基本上可用。
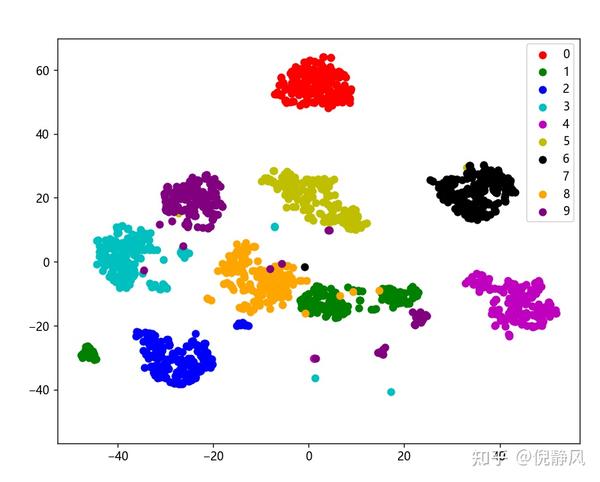
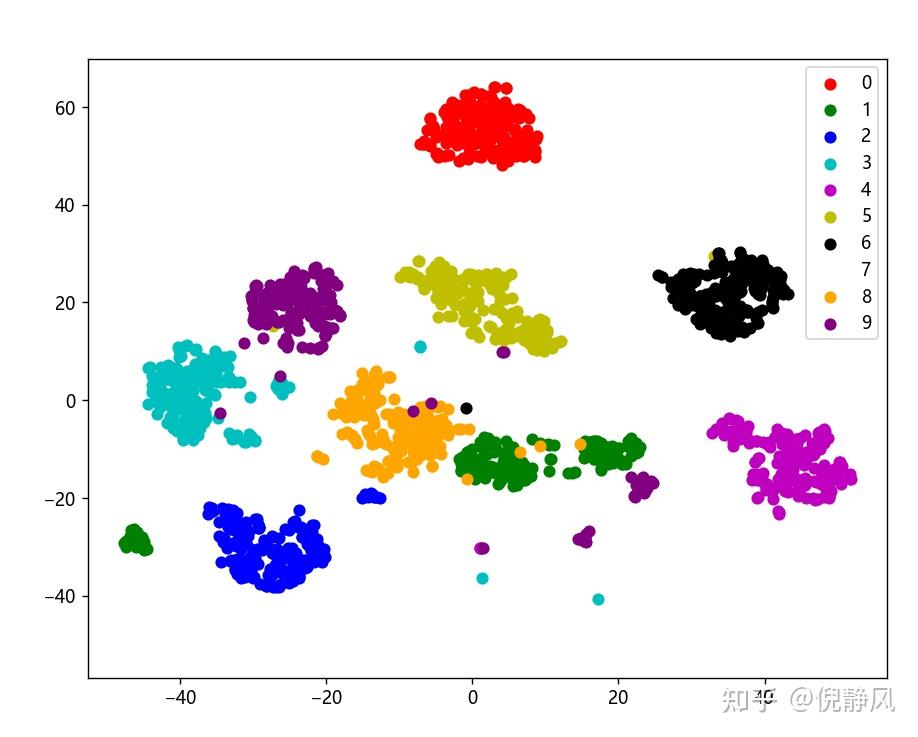
五、使用t-SNE降维
提示词:
写一个t-SNE显示程序,使用下面的程序:
# 加载手写数字数据集
digits = load_digits()
X = digits.data
y = digits.target
# 使用t-SNE 算法进行降维
结果:
import matplotlib.pyplot as plt
from sklearn import datasets
from sklearn.manifold import TSNE
# 加载手写数字数据集
digits = datasets.load_digits()
X = digits.data
y = digits.target
# 使用t-SNE算法进行降维
tsne = TSNE(n_components=2, random_state=0)
X_2d = tsne.fit_transform(X)
# 可视化结果
plt.figure(figsize=(6, 5))
colors = 'r', 'g', 'b', 'c', 'm', 'y', 'k', 'w', 'orange', 'purple'
for i, c, label in zip(range(10), colors, digits.target_names):
plt.scatter(X_2d[y == i, 0], X_2d[y == i, 1], c=c, label=label)
plt.legend()
plt.show()显示结果
六、实现一个蚂群优化算法解决TSP旅行商问题
提示词:使用python写一个蚁群优化算法实例,并显示出运行后的结果
结果:
import numpy as np
import random
import matplotlib.pyplot as plt
class AntColonyOptimization:
def __init__(self, distances, n_ants, n_best, n_iterations, decay, alpha=1, beta=1):
Args:
distances (2D numpy.ndarray): Square matrix of distances. Diagonal is assumed to be np.inf.
n_ants (int): Number of ants running per iteration
n_best (int): Number of best ants who deposit pheromone
n_iterations (int): Number of iterations
decay (float): Rate it which pheromone decays. The pheromone value is multiplied by decay, so 0.95 will lead to decay, 0.5 to much faster decay.
alpha (int or float): exponenet on pheromone, higher alpha gives pheromone more weight. Default=1
beta (int or float): exponent on distance, higher beta gives distance more weight. Default=1
self.distances = distances
self.pheromone = np.ones(self.distances.shape) / len(distances)
self.all_inds = range(len(distances))
self.n_ants = n_ants
self.n_best = n_best
self.n_iterations = n_iterations
self.decay = decay
self.alpha = alpha
self.beta = beta
def run(self):
shortest_path = None
all_time_shortest_path = ("placeholder", np.inf)
for i in range(self.n_iterations):
all_paths = self.gen_all_paths()
self.spread_pheronome(all_paths, self.n_best, shortest_path=shortest_path)
shortest_path = min(all_paths, key=lambda x: x[1])
print (f"Shortest path found in iteration {i+1}: {shortest_path}")
if shortest_path[1] < all_time_shortest_path[1]:
all_time_shortest_path = shortest_path
self.pheromone * self.decay
return all_time_shortest_path
def spread_pheronome(self, all_paths, n_best, shortest_path):
sorted_paths = sorted(all_paths, key=lambda x: x[1])
for path, dist in sorted_paths[:n_best]:
for move in path:
self.pheromone[move] += 1.0 / self.distances[move]
def gen_path_dist(self, path):
total_dist = 0
for ele in path:
total_dist += self.distances[ele]
return total_dist
def gen_all_paths(self):
all_paths = []
for i in range(self.n_ants):
path = self.gen_path(0)
all_paths.append((path, self.gen_path_dist(path)))
return all_paths
def gen_path(self, start):
path = []
visited = set()
visited.add(start)
prev = start
for i in range(len(self.distances) - 1):
move = self.pick_move(self.pheromone[prev], self.distances[prev], visited)
path.append((prev, move))
prev = move
visited.add(move)
path.append((prev, start)) # going back to where we started
return path
def pick_move(self, pheromone, dist, visited):
pheromone = np.copy(pheromone)
pheromone[list(visited)] = 0
row = pheromone ** self.alpha * (( 1.0 / dist) ** self.beta)
norm_row = row / row.sum()
move = np.random.choice(self.all_inds, 1, p=norm_row)[0]
return move
# 继续前面的代码
def plot_path(self, path):
x, y = zip(*path)
plt.plot(x, y, 'r-')
plt.title('Ant Colony Optimization Result')
plt.xlabel('City Index')
plt.ylabel('Distance')
plt.show()
# 在主函数运行蚁群优化算法并显示结果
if __name__ == "__main__":
# 我们这里假设有一个10x10的距离矩阵,实际应用中你需要将其替换为实际的距离矩阵
distances = np.random.rand(10, 10)
np.fill_diagonal(distances, np.inf)
aco = AntColonyOptimization(distances, n_ants=10, n_best=2, n_iterations=100, decay=0.95)
shortest_path = aco.run()
print("Shortest path: ", shortest_path)
aco.plot_path(shortest_path[0])中间没有完全显示,打了一个“继续后面的显示”。运行结果
七、写一个FP-Growth 算法实例
提示词:写一个FP-Growth 算法实例,并显示出来画图结果
结果:
import pyfpgrowth
import matplotlib.pyplot as plt
# 输入数据集(以列表的形式表示事务)
dataset = [['apple', 'banana', 'cherry'],
['apple', 'banana'],
['banana', 'cherry'],
['apple', 'cherry'],
['apple', 'banana', 'cherry'],
['orange']]
# 使用pyfpgrowth库找出频繁项集
frequent_itemsets = pyfpgrowth.find_frequent_patterns(dataset, 2)
rules = pyfpgrowth.generate_association_rules(frequent_itemsets, confidence=0.7)
# 打印频繁项集和关联规则
print("频繁项集:")
for itemset, support in frequent_itemsets.items():
print(f"{itemset} - 支持度: {support}")
print("\n关联规则:")
for rule, confidence in rules.items():
premise, conclusion = rule
print(f"{premise} => {conclusion} - 置信度: {confidence}")
# 绘制频繁项集的柱状图
plt.figure(figsize=(10, 5))
plt.bar(frequent_itemsets.keys(), frequent_itemsets.values(), color='blue')
plt.xlabel('频繁项集')
plt.ylabel('支持度')
plt.title('FP-Growth算法结果')
plt.show()
运行结果,出现错误:
Traceback (most recent call last):
File "d:\myprg2023\pyfpgrowth_test.py", line 14, in <module>
rules = pyfpgrowth.generate_association_rules(frequent_itemsets, confidence=0.7)
TypeError: generate_association_rules() got an unexpected keyword argument 'confidence'
可能我是安装的最新版本不兼容,把错误发给它,也没能解决,就不弄了。
八、Q 学习(Q-Learning)算法实例
提示词:写一个Q 学习(Q-Learning)算法实例
生成代码:
import numpy as np
# 初始化迷宫
maze = np.array([
[0, 0, 0, 0, 0, 0],
[0, 1, 1, 0, 1, 0],
[0, 0, 0, 1, 0, 0],
[0, 1, 1, 1, 1, 0],
[0, 0, 0, 1, 0, 2]
# 初始化Q表格
Q = np.zeros((5, 6, 4))
# 参数设置
gamma = 0.8 # 折扣因子
alpha = 0.5 # 学习率
epsilon = 0.1 # ε-贪婪策略的ε
# 动作映射
actions = ['up', 'right', 'down', 'left']
# 获取可用动作
def available_actions(state):
return [actions[i] for i in range(4) if maze[state[0], state[1], i] == 0]
# ε-贪婪策略选择动作
def select_action(state, epsilon):
if np.random.uniform() < epsilon:
return np.random.choice(available_actions(state))
else:
return max(available_actions(state), key=lambda action: Q[state[0], state[1], actions.index(action)])
# 更新Q值
def update_Q(state, action, reward, next_state):
Q[state[0], state[1], actions.index(action)] = (1 - alpha) * Q[state[0], state[1], actions.index(action)] + alpha * (reward + gamma * max(Q[next_state[0], next_state[1], :]))
# Q学习算法主体
def Q_learning():
for episode in range(100):
# 用于记录本episode的路径
path = []
state = (0, 0) # 初始状态
while state != (4, 5): # 终态为(4,5)
path.append(state) # 将当前状态添加到路径中
action = select_action(state, epsilon) # 选择动作
next_state = (state[0] + maze[state[0], state[1], actions.index('up')], state[1] + maze[state[0], state[1], actions.index('right')]) # 执行动作,获取下一个状态
reward = maze[next_state[0], next_state[1]] # 获取奖励
update_Q(state, action, reward, next_state) # 更新Q值
state = next_state # 进入下一个状态
# 打印Q表格
print("Q Table:")
for i in range(5):
for j in range(6):
print(Q[i, j, :])
# 打印路径
print("Path:")
for state in path:
print(state)
print("Episode finished.")
Q_learning()
这个需要显示多个,继续显示,但最后还是运行错误
Traceback (most recent call last):
File "d:\myprg2023\Q_learning.py", line 68, in <module>
Q_learning()
File "d:\myprg2023\Q_learning.py", line 47, in Q_learning
action = select_action(state, epsilon) # 选择动作
File "d:\myprg2023\Q_learning.py", line 32, in select_action
return max(available_actions(state), key=lambda action: Q[state[0], state[1], actions.index(action)])
File "d:\myprg2023\Q_learning.py", line 25, in available_actions
return [actions[i] for i in range(4) if maze[state[0], state[1], i] == 0]
File "d:\myprg2023\Q_learning.py", line 25, in <listcomp>
return [actions[i] for i in range(4) if maze[state[0], state[1], i] == 0]
IndexError: too many indices for array: array is 2-dimensional, but 3 were indexed
我把错误发给它的提示修改这一条:
return [actions[i] for i in range(4) if maze[state[0], state[1]] == 0] 但还是出现错误,后面就不试了。
九、使用对数函数能降低计算
提示词:使用对数函数能降低计算时,写出一些python实例
结果:
确实,对数函数可以降低某些计算的复杂性。下面是一些使用Python中对数函数的实例:
实例1:计算复利
在金融和经济学中,复利是一个常见的概念。如果你有一个初始的投资金额,每年以一定的百分比增长,那么使用对数函数可以很容易地计算经过多年后的总金额。
import math
# 初始投资金额
initial_investment = 1000
# 年利率
annual_interest_rate = 0.05
# 投资年数
years = 10
# 计算总金额
final_amount = initial_investment * math.pow((1 + annual_interest_rate), years)
print("Final amount after {} years: ${:.2f}".format(years, final_amount))实例2:计算声音的强度
声音的强度与其感知的响度不是线性关系,而是对数关系。这就是为什么我们使用分贝来测量声音强度。
# 声音的强度(以瓦特为单位)
sound_intensity = 1000
# 转换为分贝
decibels = 10 * math.log10(sound_intensity)
print("Sound intensity in decibels: {:.2f} dB".format(decibels))实例3:计算数据的熵
在信息论中,熵是衡量数据的不确定性或随机性的度量。熵的计算涉及到对数函数。
import numpy as np
# 数据的概率分布
probabilities = [0.1, 0.2, 0.3, 0.4]
# 计算熵
entropy = -np.sum(np.array(probabilities) * np.log2(np.array(probabilities)))
print("Entropy: {:.2f} bits".format(entropy))应该基本上正确
十、写一个四元数实现旋转角度的程序
提示词:使用Python定义一个四元数,并实现旋转向量的程序,同时画图,标出旋转前的向量的位置和旋转后的位置
结果:
import numpy as np
import matplotlib.pyplot as plt
class Quaternion:
def __init__(self, w, i, j, k):
self.w = w
self.i = i
self.j = j
self.k = k
def __mul__(self, other):
w = self.w*other.w - self.i*other.i - self.j*other.j - self.k*other.k
i = self.w*other.i + self.i*other.w + self.j*other.k - self.k*other.j
j = self.w*other.j - self.i*other.k + self.j*other.w + self.k*other.i
k = self.w*other.k + self.i*other.j - self.j*other.i + self.k*other.w
return Quaternion(w, i, j, k)
def rotate_vector(self, vector):
q_vector = Quaternion(0, vector[0], vector[1], vector[2])
q_conjugate = Quaternion(self.w, -self.i, -self.j, -self.k)
rotated = self * q_vector * q_conjugate
return np.array([rotated.i, rotated.j, rotated.k])
# 创建一个四元数,用于旋转
q = Quaternion(np.cos(np.radians(45)), np.sin(np.radians(45)), 0, 0)
# 创建一个向量
v = np.array([1, 1, 0])
# 通过四元数旋转向量
v_rotated = q.rotate_vector(v)