https://www.bilibili.com/video/BV113411J7nk?p=1
https://github.com/Monday-Leo/Yolov5_Tensorrt_Win10
从
yolov5 release v6.0
下载.pt模型,这里以yolov5s.pt为例。下载yolov5 6.0源代码和本仓库代码
git clone -b v6.0 https://github.com/ultralytics/yolov5.git
git clone https://github.com/Monday-Leo/Yolov5_Tensorrt_Win10
或直接到6.0页面download zip。
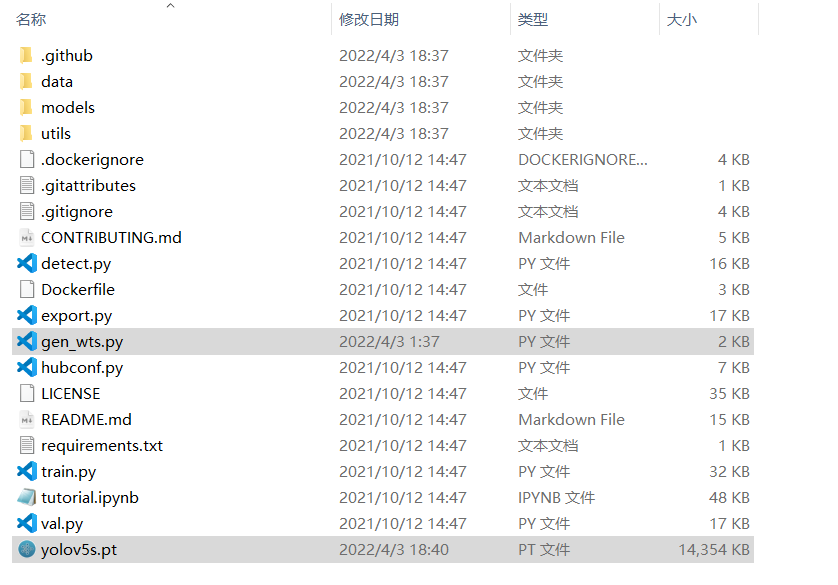
将仓库中的
gen_wts.py
和刚才下载好的yolov5s.pt拷贝至yolov5 6.0的目录下
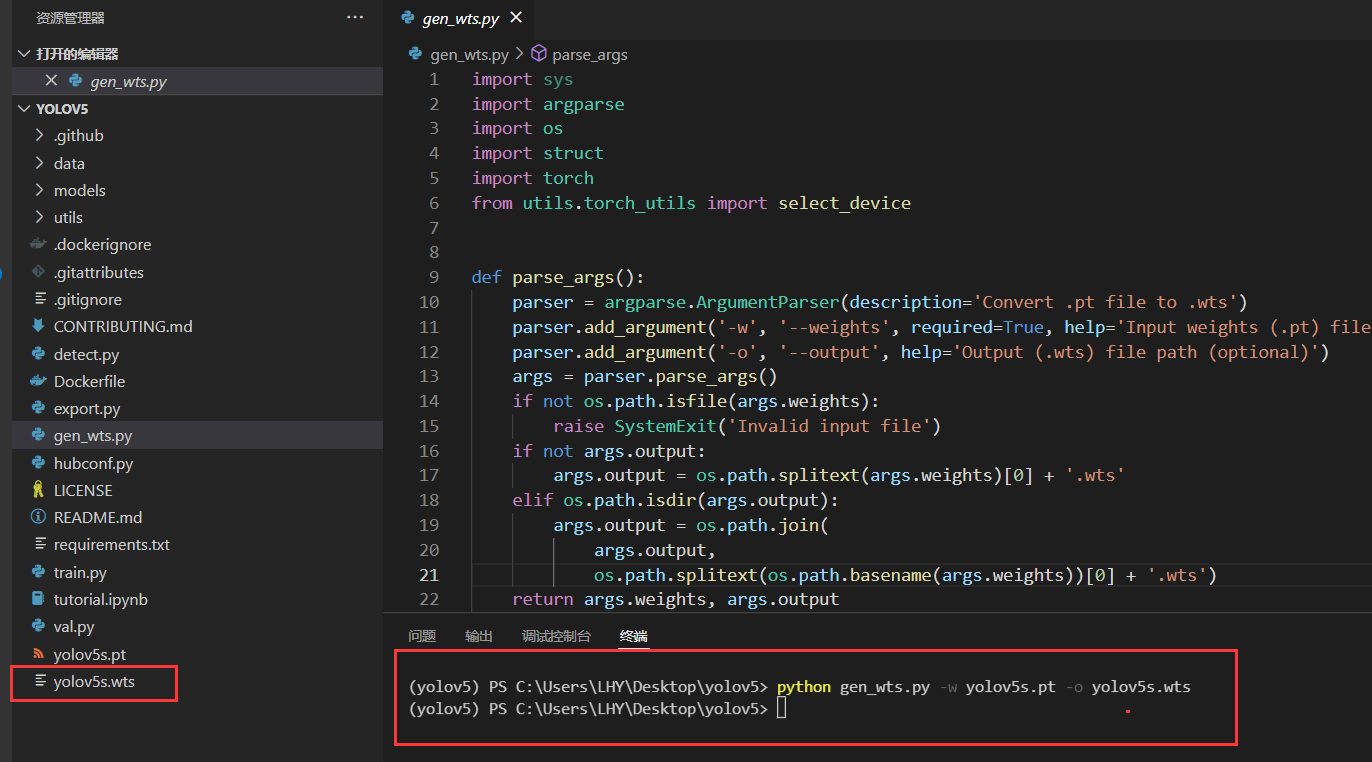
运行
python gen_wts.py -w yolov5s.pt -o yolov5s.wts
-w参数为输入pt模型路径,-o参数为输出wts模型的路径。
运行完毕后,yolov5目录下会生成wts模型,
这个模型用于之后转换为tensorrt专用的序列化模型。
Opencv
、
Tensorrt
如果已经安装完成,可以跳过下述步骤。
1、在OpenCV官网下载适用于Windows平台的3.4.6版本
下载地址
2、运行下载的可执行文件,将OpenCV解压至指定目录,例如
D:\projects\opencv
3、我的电脑->属性->高级系统设置->环境变量,在系统变量中找到Path(如没有,自行创建),并双击编辑,将opencv路径填入并保存,如
D:\projects\opencv\build\x64\vc15\bin
1、在tensorrt官网下载适用于Windows平台的版本
下载地址
2、将TensorRT/lib下所有lib复制到cuda/v10.2/lib/x64下,将TensorRT/lib下所有dll复制到cuda/v10.2/bin下,将TensorRT/include下所有.h文件复制到cuda/v10.2/include下
3、我的电脑->属性->高级系统设置->环境变量,在系统变量中找到Path(如没有,自行创建),并双击编辑,将TensorRT/lib路径填入并保存,如
G:\c++\TensorRT-8.2.1.8\lib
打开本仓库的
CMakeLists.txt
,修改
Opencv
、
Tensorrt
、
dirent.h
的目录,
其中dirent.h在本仓库的include中
,须
绝对路径
。修改
arch=compute_75;code=sm_75
,参考
https://developer.nvidia.com/zh-cn/cuda-gpus
,我的GPU为GTX1650,计算能力7.5,所以这边设置为
arch=compute_75;code=sm_75
。
cmake_minimum_required(VERSION 2.6)
project(yolov5)
#change to your own path
##################################################
set(OpenCV_DIR "G:\\c++\\paddle_test\\opencv\\build")
set(TRT_DIR "G:\\c++\\TensorRT-8.2.1.8")
set(Dirent_INCLUDE_DIRS "C:\\Users\\LHY\\Desktop\\yolov5\\tensorrt\\include")
##################################################
add_definitions(-std=c++11)
add_definitions(-DAPI_EXPORTS)
option(CUDA_USE_STATIC_CUDA_RUNTIME OFF)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_BUILD_TYPE Debug)
set(THREADS_PREFER_PTHREAD_FLAG ON)
find_package(Threads)
# setup CUDA
find_package(CUDA REQUIRED)
message(STATUS " libraries: ${CUDA_LIBRARIES}")
message(STATUS " include path: ${CUDA_INCLUDE_DIRS}")
include_directories(${CUDA_INCLUDE_DIRS})
include_directories(${Dirent_INCLUDE_DIRS})
#change to your GPU own compute_XX
###########################################################################################
set(CUDA_NVCC_FLAGS ${CUDA_NVCC_FLAGS};-std=c++11;-g;-G;-gencode;arch=compute_75;code=sm_75)
###########################################################################################
enable_language(CUDA) # add this line, then no need to setup cuda path in vs
include_directories(${PROJECT_SOURCE_DIR}/include)
include_directories(${TRT_DIR}\\include)
# -D_MWAITXINTRIN_H_INCLUDED for solving error: identifier "__builtin_ia32_mwaitx" is undefined
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -Wall -Ofast -D_MWAITXINTRIN_H_INCLUDED")
# setup opencv
find_package(OpenCV QUIET
NO_MODULE
NO_DEFAULT_PATH
NO_CMAKE_PATH
NO_CMAKE_ENVIRONMENT_PATH
NO_SYSTEM_ENVIRONMENT_PATH
NO_CMAKE_PACKAGE_REGISTRY
NO_CMAKE_BUILDS_PATH
NO_CMAKE_SYSTEM_PATH
NO_CMAKE_SYSTEM_PACKAGE_REGISTRY
message(STATUS "OpenCV library status:")
message(STATUS " version: ${OpenCV_VERSION}")
message(STATUS " libraries: ${OpenCV_LIBS}")
message(STATUS " include path: ${OpenCV_INCLUDE_DIRS}")
include_directories(${OpenCV_INCLUDE_DIRS})
link_directories(${TRT_DIR}\\lib)
add_executable(yolov5 ${PROJECT_SOURCE_DIR}/yolov5.cpp ${PROJECT_SOURCE_DIR}/yololayer.cu ${PROJECT_SOURCE_DIR}/yololayer.h ${PROJECT_SOURCE_DIR}/preprocess.cu)
target_link_libraries(yolov5 "nvinfer" "nvinfer_plugin")
target_link_libraries(yolov5 ${OpenCV_LIBS})
target_link_libraries(yolov5 ${CUDA_LIBRARIES})
target_link_libraries(yolov5 Threads::Threads)
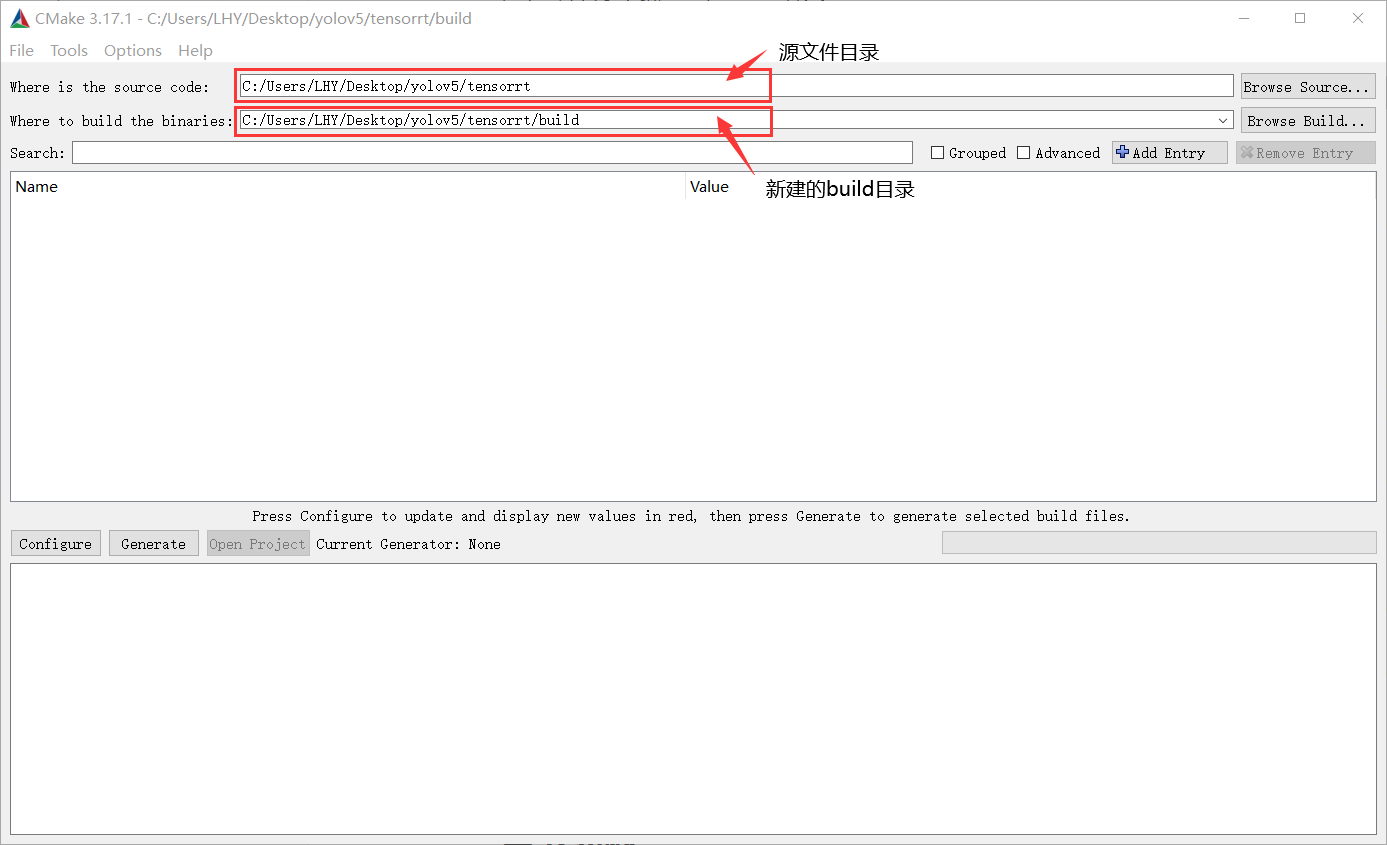
在本仓库目录下新建一个
build
文件夹
打开Cmake,选择本仓库目录,以及新建的
build
目录,再点击左下方
configure
按钮。
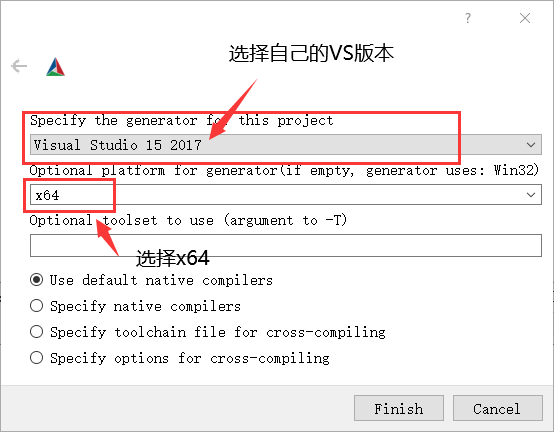
选择自己的Visual Studio版本,如2017,第二个框中选择x64,之后点击finish
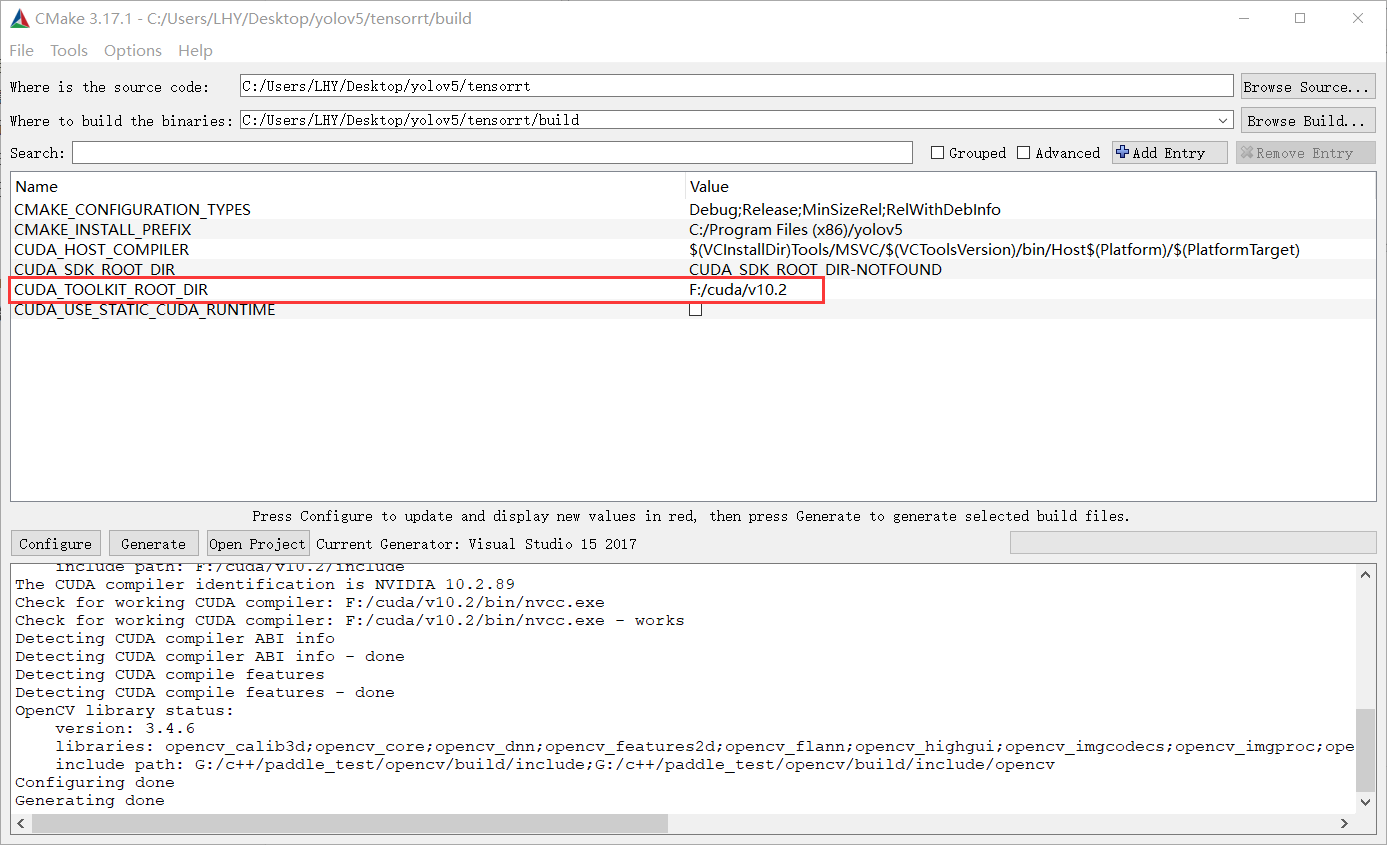
会自动加载CMakeLists.txt,添加库,正常运行如下
若出现红色警告,则需要修改框中信息。例如,
未找到cuda目录,则需要点击上图红色框,添加上自己的cuda路径
,再点击configure。一切正常之后点击generate,最后点击open project。
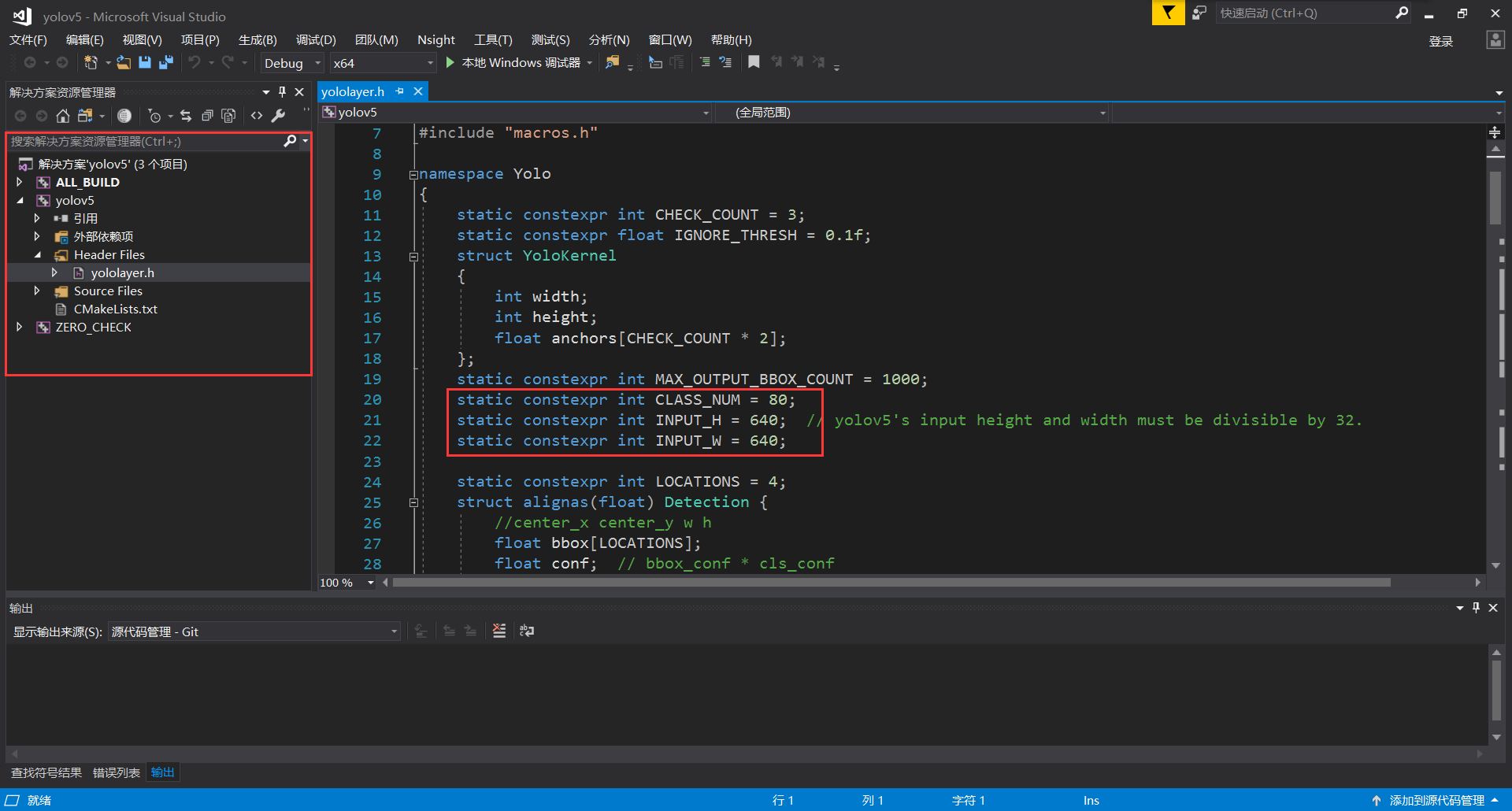
打开项目后,在左侧解决方案资源管理器中,一次展开yolov5,header files,打开yololayer.h文件,特别注意修改文件中的
static constexpr int CLASS_NUM = 80;
static constexpr int INPUT_H = 640; // yolov5's input height and width must be divisible by 32.
static constexpr int INPUT_W = 640;
修改为自己的模型类别数,输入大小,若没有修改,会运行报错!!
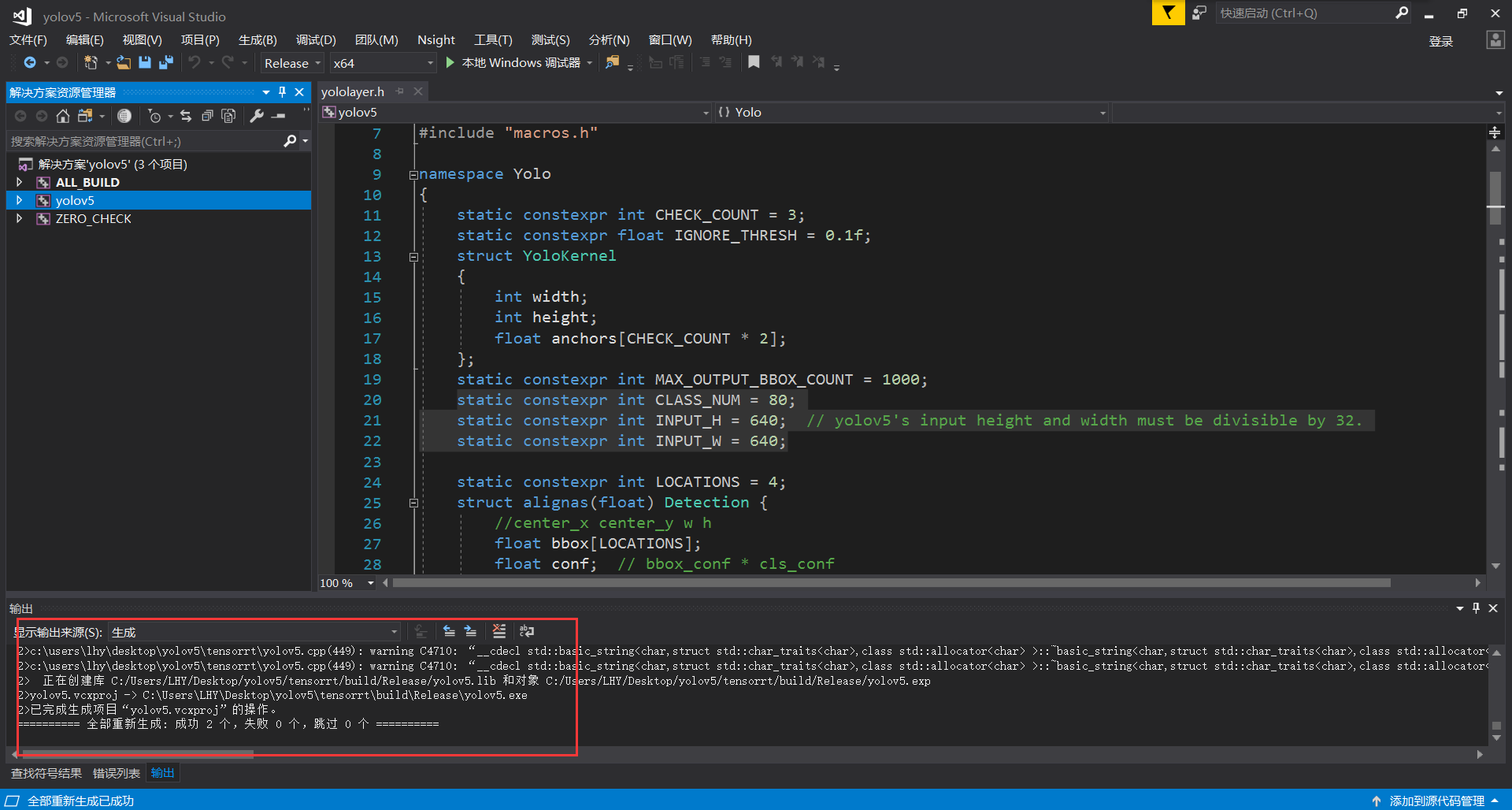
将界面上方Debug改为Release,右键yolov5项目,点击重新生成。
编译成功,没有报错!编译成功会打开build/Release,可以看到生成的exe可执行文件。
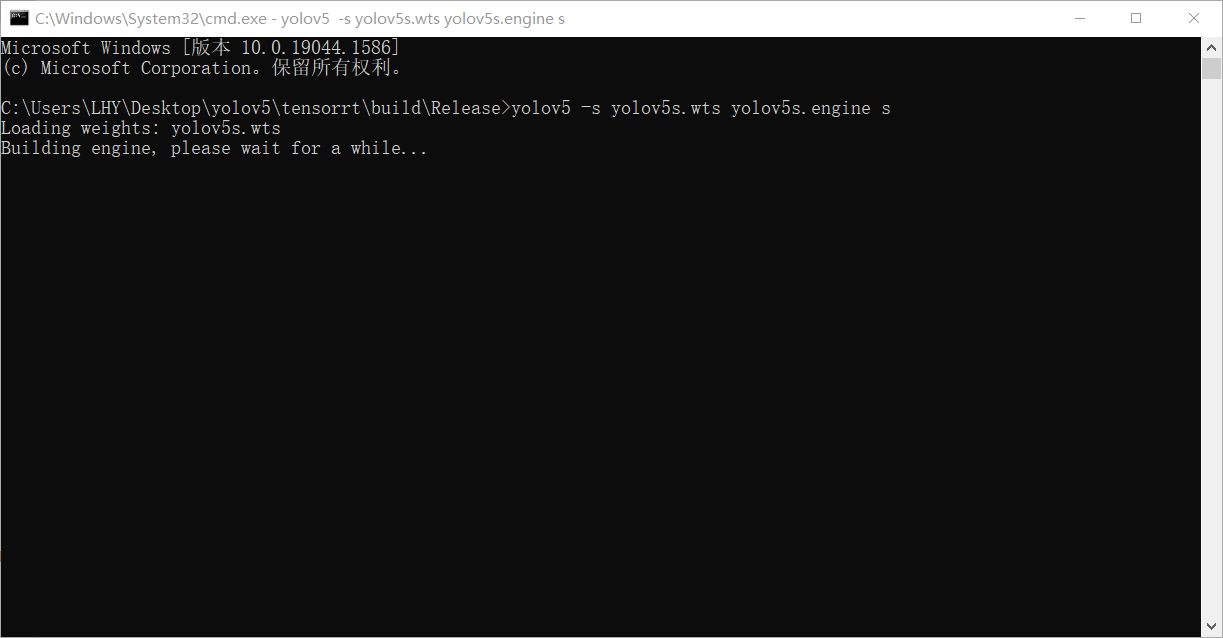
将第一步生成的yolov5s.wts模型复制到exe的文件夹中,在这个目录下打开cmd输入
yolov5 -s yolov5s.wts yolov5s.engine s
我们这边使用的是s模型,最后则输入s,同理若为m模型,最后一个参数则需要改成m
正常运行,此时程序在将wts转换为engine序列化模型,需要等待预计
10-20分钟
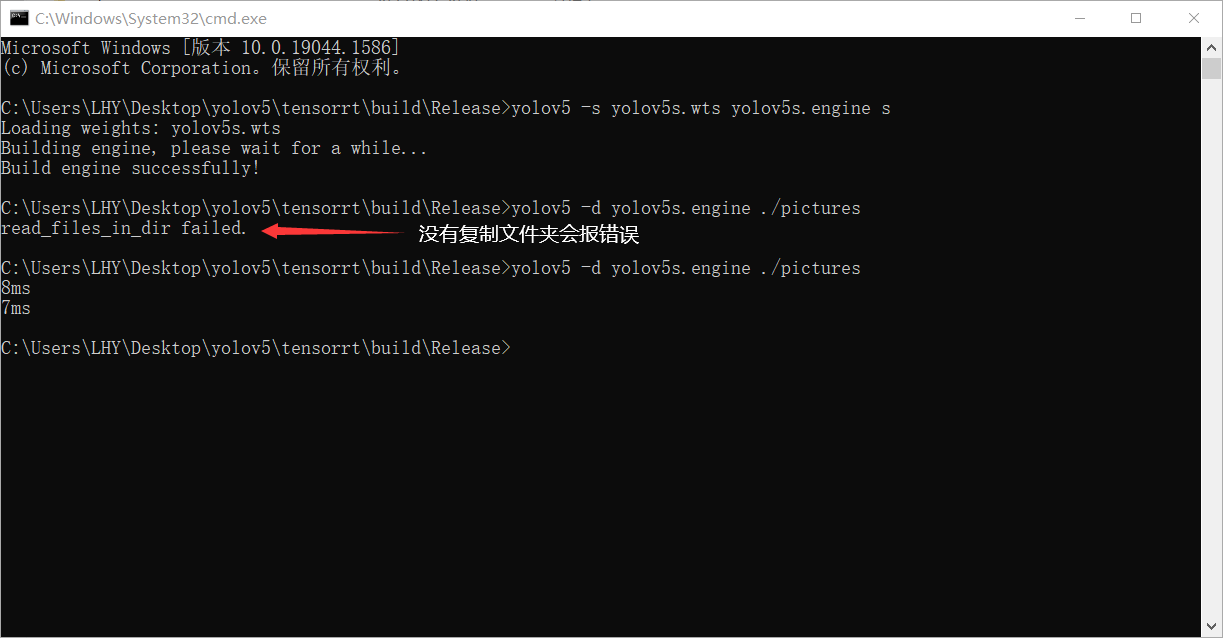
左右。生成engine完成后,会在文件夹下出现yolov5s.engine模型。将本仓库的
pictures文件夹复制到exe文件夹下
,尝试预测是否正确,输入:
yolov5 -d yolov5s.engine ./pictures
查看保存的图片,受否输出正确的框。
在C++部署正确之后,尝试使用python部署。
C++的代码预测只能通过文件夹内的图片
,对于
视频流或摄像头
预测需要修改代码,且目前
很多项目都是基于python语言完成
,故本仓库提供了
python
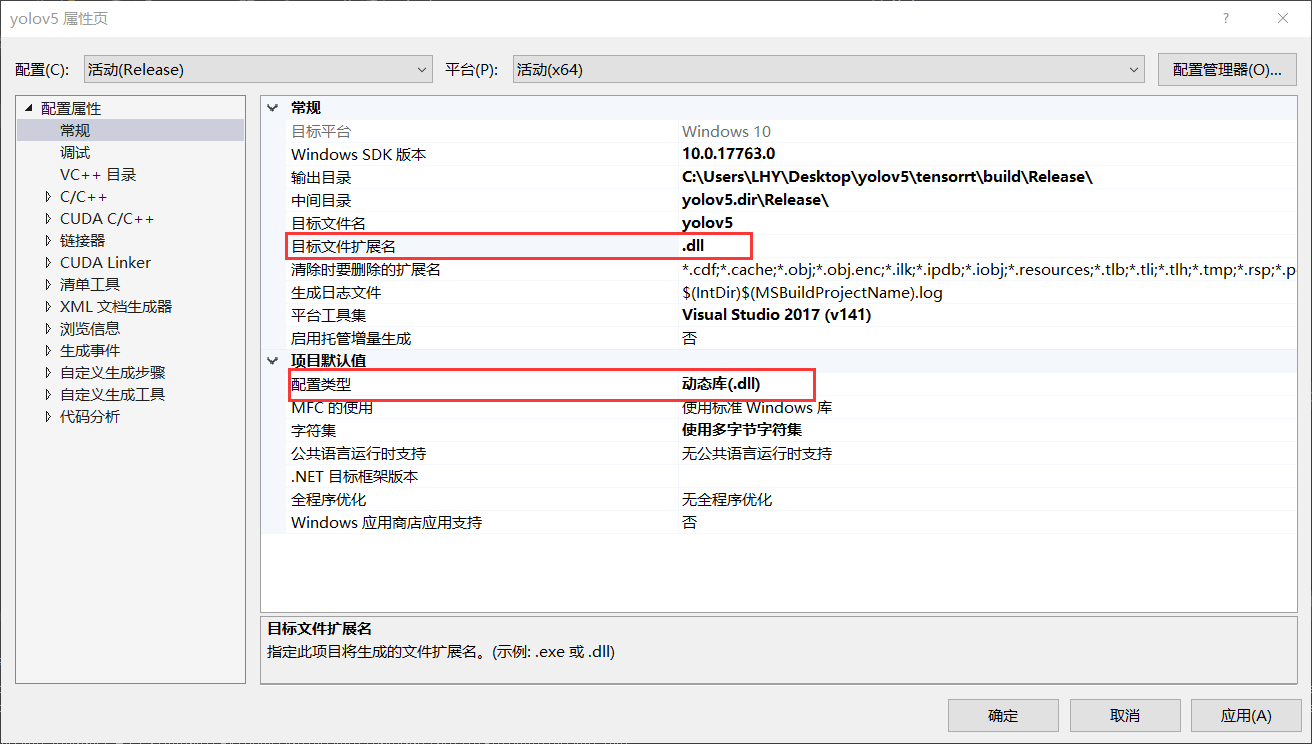
的部署方法。在刚才的C++工程中右键yolov5,点击属性。
修改上述图片两行,都改为
DLL
,第一个需要手动输入。右键项目,重新生成,文件夹下会出现
yolov5.dll
,将本仓库的
python_trt.py
复制到dll文件夹下。
设置模型路径,
dll
路径和想要预测的图片路径,
特别注意模型路径需要加b’'!!
det = Detector(model_path=b"./yolov5s.engine",dll_path="./yolov5.dll") # b'' is needed
img = cv2.imread("./pictures/zidane.jpg")
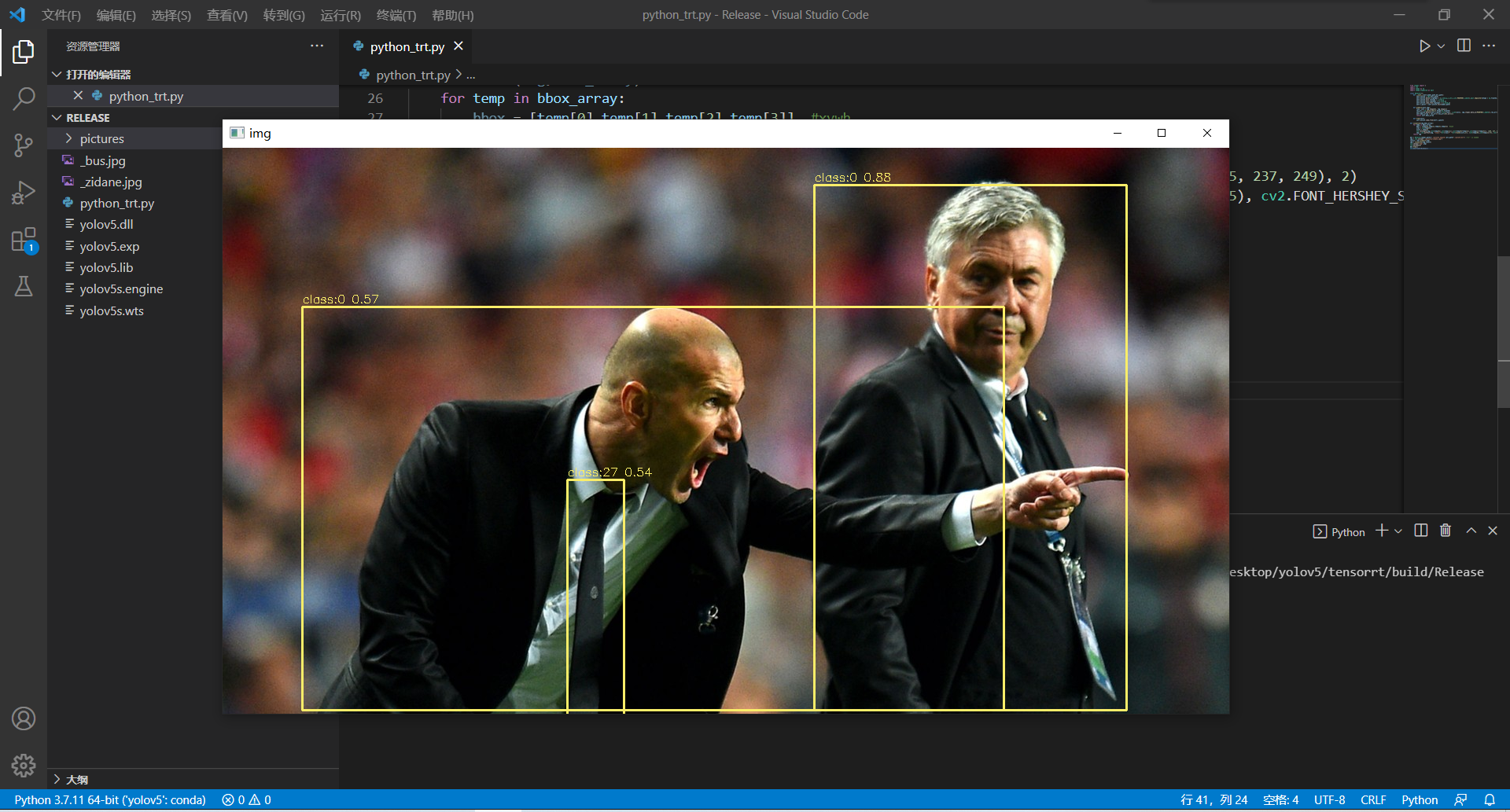
直接运行
python_trt.py
即可,
python
预测的最大优势在于支持了
numpy
格式的图片,极易融合进项目中。
https://github.com/wang-xinyu/tensorrtx/tree/master/yolov5