


【自动驾驶中的SLAM技术】第5章-基础点云处理-习题

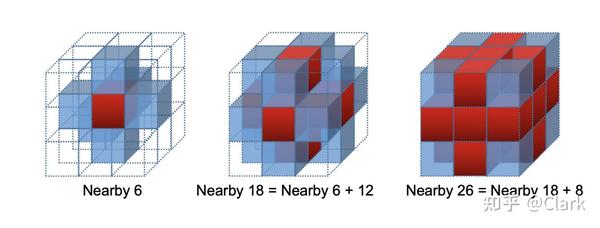
1. 在三维体素中定义 NEARBY14,实现 14 格最近邻的查找。
答:
修改点主要有以下几个地方:
1.1 在栅格类GridNN中的近邻关系枚举类型中增加一种NEARBY14,表示上下左右前后,以及八个角共14个近邻关系
src/ch5/gridnn.hpp
// 枚举类型,定义近邻关系
enum class NearbyType {
CENTER, // 只考虑中心
// for 2D
NEARBY4, // 上下,左右
NEARBY8, // 上下左右四角
// for 3D
NEARBY6, // 上下左右前后,不包含8个角
NEARBY14, // 上下左右前后,包含8个角【 新增】
1.2 在三维栅格的生成近邻生成函数GenerateNearbyGrids()中增加一个else if的分支判断,当近邻类型为NEARBY14时,生成14个近邻栅格
src/ch5/gridnn.hpp
template <>
void GridNN<3>::GenerateNearbyGrids() {
if (nearby_type_ == NearbyType::CENTER) {
nearby_grids_.emplace_back(KeyType::Zero());
} else if (nearby_type_ == NearbyType::NEARBY6) {
nearby_grids_ = {KeyType( 0, 0, 0),
KeyType(-1, 0, 0), KeyType(1, 0, 0), // 左右
KeyType( 0, 1, 0), KeyType(0, -1, 0), // 前后
KeyType( 0, 0, -1), KeyType(0, 0, 1)}; // 上下
} else if (nearby_type_ == NearbyType::NEARBY14) {
// 【新增】
nearby_grids_ = {KeyType( 0, 0, 0),
KeyType(-1, 0, 0), KeyType( 1, 0, 0), // 左右
KeyType( 0, 1, 0), KeyType( 0, -1, 0), // 前后
KeyType( 0, 0, -1), KeyType( 0, 0, 1), // 上下
KeyType(-1, -1, -1), KeyType(-1, 1, -1), // 八个角
KeyType(-1, -1, 1), KeyType(-1, 1, 1),
KeyType( 1, -1, -1), KeyType( 1, 1, -1),
KeyType( 1, -1, 1), KeyType( 1, 1, 1)};

1.3 在 http:// test_nn.cc 中GRID_NN测试案例中增加一种14格最近邻的三维栅格对象,分别增加单线程与多线程两种栅格最近邻检索的测试用例
src/ch5/ http:// test_nn.cc
...
// 对比不同种类的grid
sad::GridNN<2>
grid2_0(0.1, sad::GridNN<2>::NearbyType::CENTER),
grid2_4(0.1, sad::GridNN<2>::NearbyType::NEARBY4),
grid2_8(0.1, sad::GridNN<2>::NearbyType::NEARBY8);
sad::GridNN<3> grid3_0(0.1, sad::GridNN<3>::NearbyType::CENTER), // 【新增 by ClarkWang】
grid3_6(0.1, sad::GridNN<3>::NearbyType::NEARBY6),
grid3_14(0.1, sad::GridNN<3>::NearbyType::NEARBY14); // 【新增 by ClarkWang】
grid2_0.SetPointCloud(first);
grid2_4.SetPointCloud(first);
grid2_8.SetPointCloud(first);
grid3_0.SetPointCloud(first); // 【新增 by ClarkWang】
grid3_6.SetPointCloud(first);
grid3_14.SetPointCloud(first); // 【新增 by ClarkWang】
LOG(INFO) << "===================";
sad::evaluate_and_call(
[&first, &second, &grid3_0, &matches]() { grid3_0.GetClosestPointForCloud(first, second, matches); },
"Grid0 3D 单线程", 10); // 【新增 by ClarkWang】
EvaluateMatches(truth_matches, matches);
LOG(INFO) << "===================";
sad::evaluate_and_call(
[&first, &second, &grid3_0, &matches]() { grid3_0.GetClosestPointForCloudMT(first, second, matches); },
"Grid0 3D 多线程", 10); // 【新增 by ClarkWang】
EvaluateMatches(truth_matches, matches);
LOG(INFO) << "===================";
sad::evaluate_and_call(
[&first, &second, &grid3_6, &matches]() { grid3_6.GetClosestPointForCloud(first, second, matches); },
"Grid6 3D 单线程", 10);
EvaluateMatches(truth_matches, matches);
LOG(INFO) << "===================";
sad::evaluate_and_call(
[&first, &second, &grid3_6, &matches]() { grid3_6.GetClosestPointForCloudMT(first, second, matches); },
"Grid6 3D 多线程", 10);
EvaluateMatches(truth_matches, matches);
LOG(INFO) << "===================";
sad::evaluate_and_call(
[&first, &second, &grid3_14, &matches]() { grid3_14.GetClosestPointForCloud(first, second, matches); },
"Grid14 3D 单线程", 10); // 【新增 by ClarkWang】
EvaluateMatches(truth_matches, matches);
LOG(INFO) << "===================";
sad::evaluate_and_call(
[&first, &second, &grid3_14, &matches]() { grid3_14.GetClosestPointForCloudMT(first, second, matches); },
"Grid14 3D 多线程", 10); // 【新增 by ClarkWang】
EvaluateMatches(truth_matches, matches);
1.4 结果
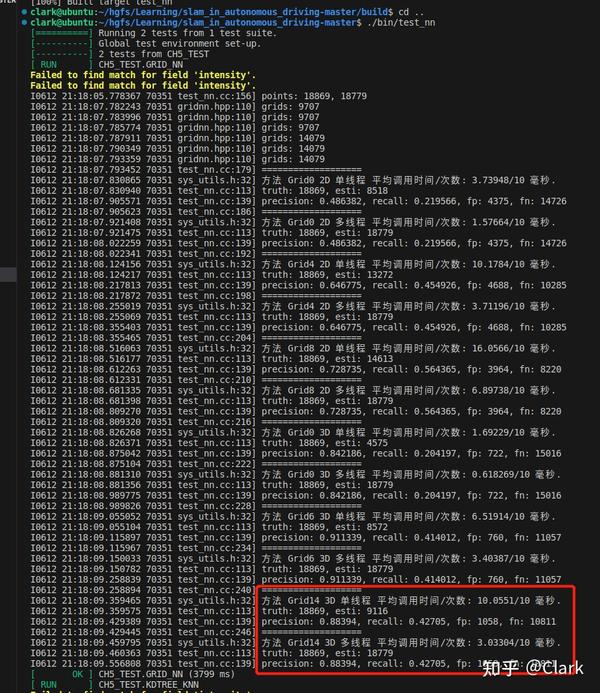

上图结果可见,在原来的三维栅格实现中增加了0格和14格的最近邻检索测试用力后,随着近邻栅格的增多, 单线程版本的栅格暴力匹配运行时间逐渐增多,14格最近邻的多线程版本的3毫秒明显要由于单线程版本的10毫秒 ,这也说明了多线程版本的栅格最近邻检索的效率要高于单线程版本。在准确率和召回率的指标方面, 整体上从上到下,三维体素要明显优于二维栅格,6格准确率接近0.91,召回率为0.41左右,但增加到14格后,准确率降到了0.88394,召回率反而提升到了0.4275,说明增加体素栅格后,误检率随之增加,而漏检率减少了 ,从fn和fp的次数相比较6格和0格也能看出。
2. 推导公式(5.32)的解为A^T*A的最大特征值对应的特征向量或者A的最大右奇异向量。
也就是推导 \boldsymbol d^* = \arg\max_d\|\boldsymbol{Ad}\|_2^2\\ 答:
首先,由于直线
l
上的点
\boldsymbol x
满足下述方程:
\boldsymbol x =\boldsymbol dt+\boldsymbol p\\
其中
\boldsymbol{d,p}\in\mathbb R^3
分别为
直线方向
,
\|\boldsymbol d\|=1
与线上的某一个点
根据勾股定理,对于不在直线
l
上的点
\boldsymbol x_k
到直线
l
的垂直距离,如下图所示,为:
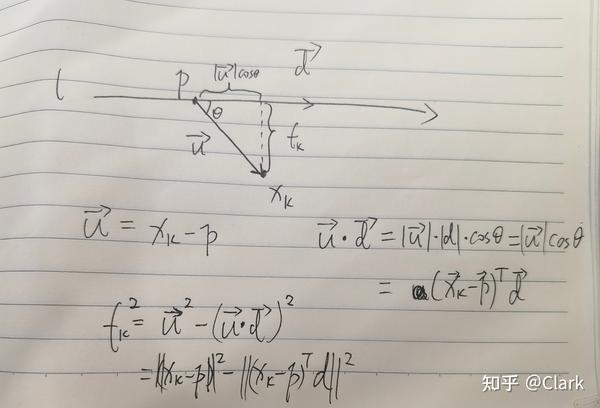

f_k^2 = \|\boldsymbol x_k-\boldsymbol p\|^2 - \|(\boldsymbol x_k-\boldsymbol p)^\top\boldsymbol d\|^2\\ 根据上式, 构造最小二乘问题 ,求解其中的 直线方向 \boldsymbol d 以及直线上的点 \boldsymbol p ,即: (\boldsymbol{d,p})^* = \arg\min_{\boldsymbol{d,p}}\sum_{k=1}^nf_k^2,\qquad\text{s.t.}\|\boldsymbol d\|=1\\ 由于每个点的误差已经取了平方,上式只需求和即可。
接下来从上式中分离出 \boldsymbol d 和 \boldsymbol p 。
先求 距离对点 \boldsymbol p 的偏导数 \frac{\partial f_k^2}{\partial\boldsymbol p} ,可得: \begin{align} \frac{\partial f_k^2}{\partial\boldsymbol p} &= \frac{\partial(\|\boldsymbol x_k-\boldsymbol p\|^2 - \|(\boldsymbol x_k-\boldsymbol p)^T\boldsymbol d\|^2)}{\partial\boldsymbol p}\notag\\ &=-2(\boldsymbol x_k-\boldsymbol p) + 2\underbrace{(\boldsymbol x_k-\boldsymbol p)^\top\boldsymbol d}_{标量=\boldsymbol d^\top(\boldsymbol x_k-\boldsymbol p)}\boldsymbol d\notag\\ &=-2(\boldsymbol x_k-\boldsymbol p) + 2\boldsymbol d\underbrace{\boldsymbol d^\top(\boldsymbol x_k-\boldsymbol p)}_{标量}\notag\\ &=-2(\boldsymbol I- 2\boldsymbol d\boldsymbol d^\top)(\boldsymbol x_k-\boldsymbol p)\notag\\ \end{align}\\ 再对上式求和,可得整体的目标函数关于点 \boldsymbol p 的偏导数: \begin{align} \frac{\partial \sum_{k=1}^nf_k^2}{\partial\boldsymbol p} &=\sum_{k=1}^n\left[-2(\boldsymbol I- 2\boldsymbol d\boldsymbol d^\top)(\boldsymbol x_k-\boldsymbol p)\right]\notag\\ &=-2(\boldsymbol I- 2\boldsymbol d\boldsymbol d^\top)\sum_{k=1}^n(\boldsymbol x_k-\boldsymbol p)\notag\\ \end{align}\\ 令上式的 偏导数为零 ,可得: \boldsymbol p = \frac{1}{n}\sum_{k=1}^n\boldsymbol x_k\\ 也就是点 \boldsymbol p 取了整个点云的中心。
在确定了点 \boldsymbol p 的情况下,再来考虑直线的方向 \boldsymbol d ,这里令 \boldsymbol y_k = \boldsymbol x_k-\boldsymbol p ,由于 \boldsymbol p,\boldsymbol x_k 已知,所以 \boldsymbol y_k 也是已知量了,代回原始距离平方公式中: \begin{align} f_k^2 &= \|\boldsymbol x_k-\boldsymbol p\|^2 - \|(\boldsymbol x_k-\boldsymbol p)^\top\boldsymbol d\|^2\notag\\ &= \|\boldsymbol y_k\|^2 - \|\boldsymbol y_k^\top\boldsymbol d\|^2\notag\\ &= \boldsymbol y_k^\top\boldsymbol y_k - (\boldsymbol y_k^\top\boldsymbol d)^\top\boldsymbol y_k^\top\boldsymbol d\notag\\ &= \boldsymbol y_k^\top\boldsymbol y_k - \boldsymbol d^\top\boldsymbol y_k\boldsymbol y_k^\top\boldsymbol d\notag\\ \end{align}\\ 此时等式右侧第一项不含 \boldsymbol d ,可以 忽略 ,因此 求解上式的最小值问题,可以转换为求解第二项去掉负号后的最大值问题 。 \boldsymbol d^* = \arg\max_{\boldsymbol d}\sum_{k=1}^n\boldsymbol d^\top\boldsymbol y_k\boldsymbol y_k^\top\boldsymbol d= \arg\max_{\boldsymbol d}\sum_{k=1}^n\|\boldsymbol y_k^\top\boldsymbol d\|_2^2\\ 再令 \boldsymbol A = \begin{bmatrix} \boldsymbol y_1^\top\\\vdots\\\boldsymbol y_n^\top \end{bmatrix}\\ 则可以去掉求和符号,转变为矩阵相乘形式: \boldsymbol d^* = \arg\max_{\boldsymbol d}\|\boldsymbol A\boldsymbol d\|_2^2\\ 求解上式的最大值,可以通过 线性最小二乘的特征值解法 或者 奇异值解法 进行求解:
2.1 特征值解法
由于矩阵 \boldsymbol A 是一个 n\times 3 的矩阵,需要计算一个 \boldsymbol d^* 的三维列向量,使得 \boldsymbol d^* = \arg\max_{\boldsymbol d}\|\boldsymbol A\boldsymbol d\|_2^2 = \arg\max_{\boldsymbol d}\boldsymbol d^\top\boldsymbol A^\top\boldsymbol A\boldsymbol d,\qquad\text{s.t.}\|\boldsymbol d\|=1\\ 可以看出上式中的 \boldsymbol{A^\top A} 是一个 实对称矩阵 ,根据线性代数知识可知,实对称矩阵可以 利用特征值分解进行对角化 可得 \boldsymbol{A^\top A = V\Lambda V^\top}\\ 其中 \boldsymbol\Lambda 是 对角特征值矩阵 ,可以假设 从大到小顺序排列 ,记为 \lambda_1,\cdots,\lambda_n , \boldsymbol V 是正交矩阵,列向量为每一维特征值对应的特征向量,记作 \boldsymbol v_1,\cdots,\boldsymbol v_n ,这 n 个特征向量构成了一组 单位正交基 。也就是说任意一个三维向量 \boldsymbol d 都可以表示为: \begin{align} \boldsymbol d &= \beta_1\boldsymbol v_1+\cdots+\beta_n\boldsymbol v_n\notag\\ &= \begin{bmatrix} \boldsymbol v_1&\cdots&\boldsymbol v_n \end{bmatrix}\begin{bmatrix} \beta_1\\\vdots\\\beta_n \end{bmatrix}\notag\\ &=\boldsymbol {VB} \end{align}\\ 两边同时左乘一个矩阵 \boldsymbol V 的转置,可得: \boldsymbol{V^{-1}d} \overset{正交}{=} \boldsymbol{V^\top d} = \begin{bmatrix} \beta_1\\\vdots\\\beta_n \end{bmatrix}\\ 因此: \begin{align} \|\boldsymbol A\boldsymbol d\|_2^2&=\boldsymbol d^\top\boldsymbol A^\top\boldsymbol A\boldsymbol d\notag\\ &=\boldsymbol{d^\top V\Lambda V^\top d}\notag\\ &=\begin{bmatrix}\beta_1&\cdots&\beta_n\end{bmatrix}\begin{bmatrix} \lambda_1&&\\ &\ddots&\\ &&\lambda_n \end{bmatrix}\begin{bmatrix}\beta_1\\\vdots\\\beta_n\end{bmatrix}\notag\\ &=\sum_{i=1}^n\lambda_i\beta_i^2\notag\\ \end{align}\\ 由于 \boldsymbol d 是单位向量,也就是 \|\boldsymbol d\|^2 = \beta_1^2+\cdots+\beta_n^2=1 ,又因为特征值是 降序排列 的,那么就取 \beta_1=1,\beta_2=0\cdots,\beta_n=0 ,即 \boldsymbol d^*=\boldsymbol v_1
至此,线性最小二乘的最优解,是 \boldsymbol{A^\top A} 最大特征值对应的特征向量
2.2 奇异值解法
也可以通过奇异值分解SVD的角度来处理,由于已知 任意矩阵都可以进行奇异值分解 ,于是可以对矩阵 \boldsymbol A 进行SVD分解,可得: \boldsymbol{A = U\Sigma V^\top}\\ 其中, \boldsymbol{UV} 是正交矩阵, \boldsymbol\Sigma 是对角矩阵,也称为 奇异值矩阵 ,对角线上的元素为矩阵 \boldsymbol A 的奇异值, 由大到小排列 , \sigma_1\geq\sigma_2\geq\cdots\geq\sigma_n\geq0 , 其余元素均为零 。
于是可以将SVD的分解结果带回原始可得:
\boldsymbol d^\top\boldsymbol A^\top\boldsymbol A\boldsymbol d = \boldsymbol d^\top\boldsymbol V\Sigma^\top\boldsymbol U^\top\boldsymbol U\Sigma\boldsymbol V^\top\boldsymbol d = \boldsymbol d^\top\boldsymbol V\Sigma^2\boldsymbol V^\top\boldsymbol d\\
到了这一步,类似特征值的解法,可以取
\boldsymbol d
为矩阵
\boldsymbol V
的第一列即可,也就是矩阵
\boldsymbol A
的最大奇异值对应的右奇异值向量。
综上所述
,
线性最小二乘的最优解,是
\boldsymbol{A^\top A}
最大特征值对应的特征向量,或者是矩阵
\boldsymbol A
的最大奇异值对应的右奇异值向量。
3. 将本节的最近邻算法与一些常见的近似最近邻算法进行对比,比如nanoflann,给出精度指标和时间效率指标。
答:
这里选择题目推荐的 nanoflann 库进行对比,精度指标与时间效率指标与书上一致。
3.1 nanoflann库熟悉
首先,从github上克隆代码到本地,其实只有一个hpp文件,将其与第5章的代码放在同一级目录下,使用起来非常方便,只需在 http:// test_nn.cc 文件中引入该头文件即可使用:
#include "ch5/nanoflann.hpp"
通过查看nanoflann项目中的几个examples,其中 pointcloud_kdd_radius.cpp的示例 最相关,给出了如何构建KD树、两种执行最近邻搜索的方法 knnSearch()、radiusSearch() 的使用,再结合对应 doxygen文档 中函数参数的说明:

template
<typename num_t>
void kdtree_demo(const size_t N)
PointCloud<num_t> cloud; // 创建点云对象
// Generate points:
// 生成随机点云
generateRandomPointCloud(cloud, N);
// construct a kd-tree index 使用using定义kd树类型
using my_kd_tree_t = nanoflann::KDTreeSingleIndexAdaptor<nanoflann::L2_Simple_Adaptor<num_t, PointCloud<num_t>>,
PointCloud<num_t>, 3 /* dim */>;
// 构建kd树索引
my_kd_tree_t index(3 /*dim*/, // 3维空间
cloud, // 点云对象
{10 /* max leaf */}); // 最大叶子节点数
// 待查询点
const num_t query_pt[3] = {0.5, 0.5, 0.5};
// ----------------------------------------------------------------
// knnSearch(): Perform a search for the N closest points
// 执行搜索以查找最近的N个点
// ----------------------------------------------------------------
size_t num_results = 5; // 最近的5个点
std::vector<uint32_t> ret_index(num_results); // 返回的点的索引
std::vector<num_t> out_dist_sqr(num_results); // 返回的点的距离
// 调用knnSearch()函数,返回最近的5个点的索引和距离
num_results = index.knnSearch(&query_pt[0], num_results, &ret_index[0], &out_dist_sqr[0]);
// In case of less points in the tree than requested: 如果树中的点少于请求的点,则重新调整返回的点的索引和距离容器的大小
ret_index.resize(num_results);
out_dist_sqr.resize(num_results);
cout << "knnSearch(): num_results=" << num_results << "\n";
for (size_t i = 0; i < num_results; i++)
cout << "idx[" << i << "]=" << ret_index[i] << " dist[" << i << "]=" << out_dist_sqr[i] << endl;
cout << "\n";
// ----------------------------------------------------------------
// radiusSearch(): Perform a search for the points within search_radius
// 执行搜索以查找search_radius半径内的点
// ----------------------------------------------------------------
const num_t search_radius = static_cast<num_t>(0.1);
std::vector<nanoflann::ResultItem<uint32_t, num_t>> ret_matches;
// nanoflanSearchParamsameters params;
// params.sorted = false;
// 调用radiusSearch()函数,返回指定搜索半径内的点的索引和距离
const size_t nMatches = index.radiusSearch(&query_pt[0], search_radius, ret_matches);
cout << "radiusSearch(): radius=" << search_radius << " -> " << nMatches << " matches\n";
for (size_t i = 0; i < nMatches; i++)
cout << "idx[" << i << "]=" << ret_matches[i].first << " dist[" << i << "]=" << ret_matches[i].second << endl;
cout << "\n";
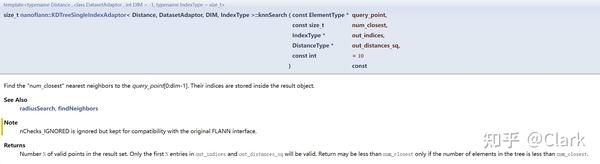
在另一个例程 pointcloud_example.cpp 中,给出了另一种近邻搜索的使用方法,就是利用 findNeighbors() 函数,对应函数说明如下图所示:
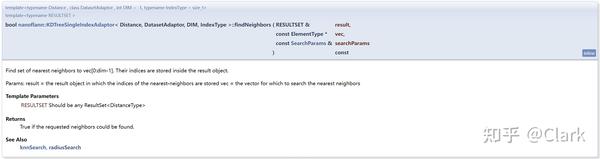

demo代码如下:
template <typename num_t>
void kdtree_demo(const size_t N)
static_assert(std::is_standard_layout<nanoflann::ResultItem<num_t, size_t>>::value, "Unexpected memory layout for nanoflann::ResultItem");
PointCloud<num_t> cloud;
// Generate points:
generateRandomPointCloud(cloud, N);
num_t query_pt[3] = {0.5, 0.5, 0.5};
// construct a kd-tree index:
using my_kd_tree_t = nanoflann::KDTreeSingleIndexAdaptor<nanoflann::L2_Simple_Adaptor<num_t, PointCloud<num_t>>,
PointCloud<num_t>, 3 /* dim */>;
dump_mem_usage();
my_kd_tree_t index(3 /*dim*/, cloud, {10 /* max leaf */});
dump_mem_usage();
// do a knn search
const size_t num_results = 1;
size_t ret_index;
num_t out_dist_sqr;
nanoflann::KNNResultSet<num_t> resultSet(num_results);
resultSet.init(&ret_index, &out_dist_sqr);
index.findNeighbors(resultSet, &query_pt[0]);
std::cout << "knnSearch(nn=" << num_results << "): \n";
std::cout << "ret_index=" << ret_index
<< " out_dist_sqr=" << out_dist_sqr << std::endl;
// radius search:
const num_t squaredRadius = 1;
std::vector<nanoflann::ResultItem<size_t, num_t>> indices_dists;
nanoflann::RadiusResultSet<num_t, size_t> resultSet(squaredRadius, indices_dists);
index.findNeighbors
(resultSet, query_pt);
// Get worst (furthest) point, without sorting:
nanoflann::ResultItem<size_t, num_t> worst_pair = resultSet.worst_item();
std::cout << "Worst pair: idx=" << worst_pair.first
<< " squaredDist=" << worst_pair.second << std::endl;
3.2 工程代码修改与精度耗时对比
在3.1小节中已经大致熟悉了nanoflann中几个示例与关键函数的使用,这一小节直接将其用于第五章的GTest测试代码框架中,稍作修改后, 与高博新书实现的kd树以及pcl版本的kd树进行比较 。
添加头文件后,在最上方定义了一个适配nanoflann的点云结构体,便于其函数调用:
template <typename T>
struct PointCloud_NanoFlann
struct Point
T x, y, z;
using coord_t = T; //!< The type of each coordinate
std::vector<Point> pts;
inline size_t kdtree_get_point_count() const { return pts.size(); }
inline T kdtree_get_pt(const size_t idx, const size_t dim) const
if (dim == 0)
return pts[idx].x;
else if (dim == 1)
return pts[idx].y;
return pts[idx].z;
template <class BBOX>
bool kdtree_get_bbox(BBOX& /* bb */) const
return false;
在KDTREE_KNN测试用例中pcl版本的kdtree下方添加一组nanoflann版本的kdtree测试代码,大致过程为:
- 用定义的结构体Pointcloud_NanoFlann以及first点云初始化一个kdtree类对象;
- 调用kdtree类对象的buildIndex()函数构建kd树索引;
- 利用for_each的std::execution::par_unseq对second点云中的每个点并发调用K近邻搜索,返回每个待检索点最近的k个点的索引和距离并保存;
- 将所有second点云中点检索的前5个最近邻点的索引和距离整合到match匹配数组中用于跟暴力近邻检索的真值结果进行对比,计算得到准确率和召回率,再与另两种方法比较kd树构建耗时、近邻检索耗时。
分别利用 两种方法实现了基于nanoflann版本的kdtree ,如下所示:
/////////////////////////// kdtree nanoflann测试 1////////////////////////////////
LOG(INFO) << "building kdtree nanflann";
using kdtree_nano = nanoflann::KDTreeSingleIndexAdaptor<nanoflann::L2_Simple_Adaptor<float, PointCloud_NanoFlann<float>>,
PointCloud_NanoFlann<float>, 3>;
kdtree_nano* my_kdtree_nano;
// nanoflann tree
PointCloud_NanoFlann<float> first_cloud_flann;
first_cloud_flann.pts.resize(first->points.size());
for (int i = 0; i < first->points.size(); i++)
first_cloud_flann.pts[i].x = first->points[i].x;
first_cloud_flann.pts[i].y = first->points[i].y;
first_cloud_flann.pts[i].z = first->points[i].z;
sad::evaluate_and_call([&first, &my_kdtree_nano, &first_cloud_flann]() {
my_kdtree_nano = new kdtree_nano(3, first_cloud_flann, nanoflann::KDTreeSingleIndexAdaptorParams(10));
my_kdtree_nano->buildIndex();
}, "Kd Tree build", 1);
LOG(INFO) << "searching nanoflann";
matches.clear();
int k = 5;
std::vector<std::vector<uint32_t>> ret_index_all;
std::vector<std::vector<float>> out_dist_sqr_all;
ret_index_all.resize(second->size());
out_dist_sqr_all.resize(second->size());
sad::evaluate_and_call([&second, &my_kdtree_nano, &matches, &k, &ret_index_all, &out_dist_sqr_all]() {
// 索引
std::vector<int> index(second->size());
for (int i = 0; i < second->points.size(); ++i) {
index[i] = i;
std::for_each(std::execution::par_unseq, index.begin(), index.end(), [&second, &my_kdtree_nano, &k, &ret_index_all, &out_dist_sqr_all](int idx) {
std::vector<uint32_t> ret_index(k); // 返回的点的索引
std::vector<float> out_dist_sqr(k); // 返回的点的距离
// 获取第二个点云中的每个点,作为当前待查询点
float query_p[3] = { second->points[idx].x, second->points[idx].y, second->points[idx].z};
// 调用knnSearch()函数,返回最近的5个点的索引和距离
int num_results = my_kdtree_nano->knnSearch(&query_p[0], k, &ret_index[0], &out_dist_sqr[0]);
ret_index.resize(num_results);
out_dist_sqr.resize(num_results);
ret_index_all[idx] = ret_index;
out_dist_sqr_all[idx] = out_dist_sqr;
// 遍历每个点,获取最近的5个点的索引和距离
for (int i = 0; i < second->points.size(); i++) {
// 遍历每个点的最近的5个点
for (int j = 0; j < ret_index_all[i].size(); ++j) {
int m = ret_index_all[i][j]; // 最近的5个点的索引
double d = out_dist_sqr_all[i][j]; // 最近的5个点的距离
matches.push_back({m, i}); // 将最近的5个点的索引和距离存入matches
"Kd Tree 5NN in nanoflann", 1);
EvaluateMatches(true_matches, matches);
/////////////////////////// kdtree nanoflann测试 2 ////////////////////////////////
LOG(INFO) << "building kdtree nanflann 2";
kdtree_nano* my_kdtree_nano2;
sad::evaluate_and_call([&first, &my_kdtree_nano2, &first_cloud_flann]() {
my_kdtree_nano2 = new kdtree_nano(3, first_cloud_flann, nanoflann::KDTreeSingleIndexAdaptorParams(10));
my_kdtree_nano2->buildIndex();
}, "Kd Tree build", 1);
LOG(INFO) << "searching nanoflann 2";
matches.clear();
std::vector<std::vector<size_t>> ret_index_all2;
std::vector<std::vector<float>> out_dist_sqr_all2;
ret_index_all2.resize(second->size());
out_dist_sqr_all2.resize(second->size());
sad::evaluate_and_call([&second, &my_kdtree_nano2, &matches, &k, &ret_index_all2, &out_dist_sqr_all2]() {
// 索引
std::vector<int> index(second->size());
for (int i = 0; i < second->points.size(); ++i) {
index[i] = i;
std::for_each(std::execution::par_unseq, index.begin(), index.end(), [&second, &my_kdtree_nano2, &k, &ret_index_all2, &out_dist_sqr_all2](int idx) {
size_t ret_index[k]; // 返回的点的索引
float out_dist_sqr[k]; // 返回的点的距离
// 获取第二个点云中的每个点,作为当前待查询点
float query_p[3] = { second->points[idx].x, second->points[idx].y, second->points[idx].z};
nanoflann::KNNResultSet<float> resultSet(k);
resultSet.init(ret_index, out_dist_sqr);
my_kdtree_nano2->findNeighbors(resultSet, query_p);
std::vector<size_t> ret_index_(ret_index, ret_index+k); // 返回的点的索引
std::vector<float> out_dist_sqr_(out_dist_sqr, out_dist_sqr+k); // 返回的点的距离
ret_index_all2[idx] = ret_index_;
out_dist_sqr_all2[idx] = out_dist_sqr_;
// 遍历每个点,获取最近的5个点的索引和距离
for (int i = 0; i < second->points.size(); i++) {
// 遍历每个点的最近的5个点
for (int j = 0; j < ret_index_all2[i].size(); ++j) {
int m = ret_index_all2[i][j]; // 最近的5个点的索引
double d = out_dist_sqr_all2[i][j]; // 最近的5个点的距离
matches.push_back({m, i}); // 将最近的5个点的索引和距离存入matches