1.1频域滤波步骤小结
在频域中的滤波是简单明了的。它包含如下步骤:
(1)给定一幅大小为M
N的输入图像f(x,y),选择填充参数P,Q,典型地,我们选择P=2M和Q=2N。
(2)对f(x,y)添加必要数量的0,形成大小为P
Q的填充后的图像fp(x,y)。
(3)用(-1)x+y乘以fp(x,y)移到其变换的中心。
(4)计算来自步骤3的图像DFT,得到F(u,v)。
(5)生成一个实的、对称的滤波函数H(u,v),其大小为P
Q,中心在(P/2,Q/2)处。用阵列相乘形成乘积G(u,v)=H(u,v)F(u,v);
(6)得到处理后的图像:
(7)通过从gp(x,y)的左上象限提取M
N区域,得到最终处理结果g(x,y)。
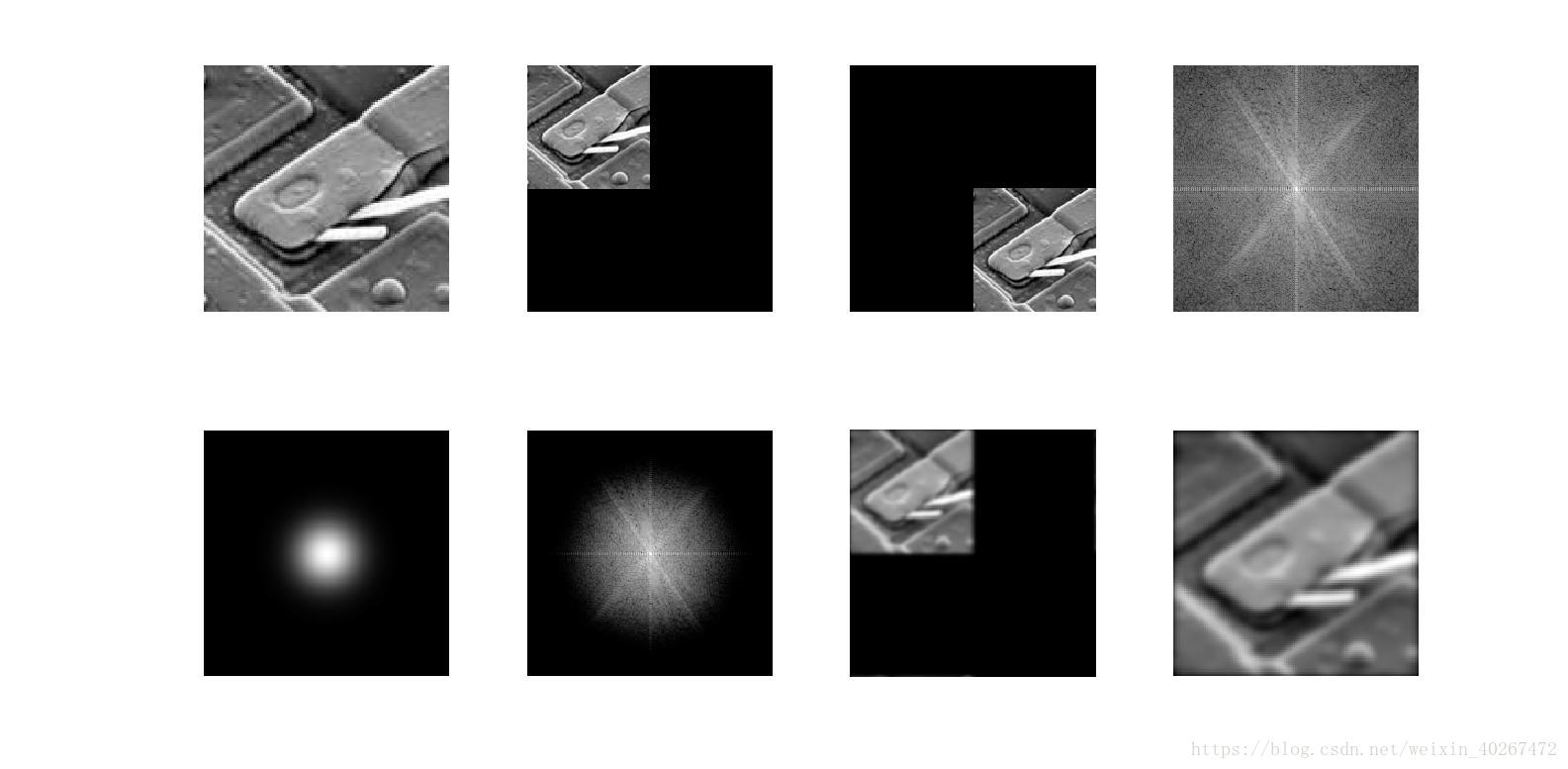
参照课本p264进行实验,如图1所示,详细可见程序filtPro.m。
1.2带阻滤波器
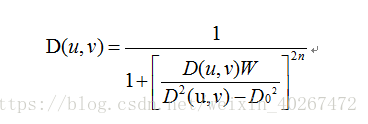
理想带阻滤波器的表达式为:
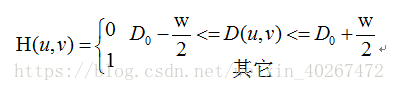
其中,D(u,v)是到中心化频率矩形原点的距离,W是频带的宽度,D0是频带的中心半径。
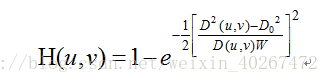
同样,n阶的巴特沃斯带阻滤波器的表达式为:
高斯带阻滤波器的表达式为:
详细可见程序lowpfilter.m,参考课本p336利用带阻滤波器消除周期性噪声,如图4所示,具体代码可见filtCircle.m.
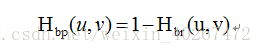
1.3带通滤波器
带通滤波器执行与带阻滤波器相反的操作。带通滤波器的传递函数Hbp(u,v)是根据相应的带阻滤波器的传递函数Hbr(u,v)并应用下式:
1.4陷波滤波器
陷波滤波器阻止(或通过)事先定义的中心频率领域内的频率。假定频率矩形的中心已经移动到点(M/2,N/2),(u0,v0)的值对应移动中心,则有

程序notchfilter.m为带阻陷波滤波器,分别为理想型、巴特沃斯、高斯带阻陷波滤波器,notchfilter_1.m为带阻陷波滤波器对。
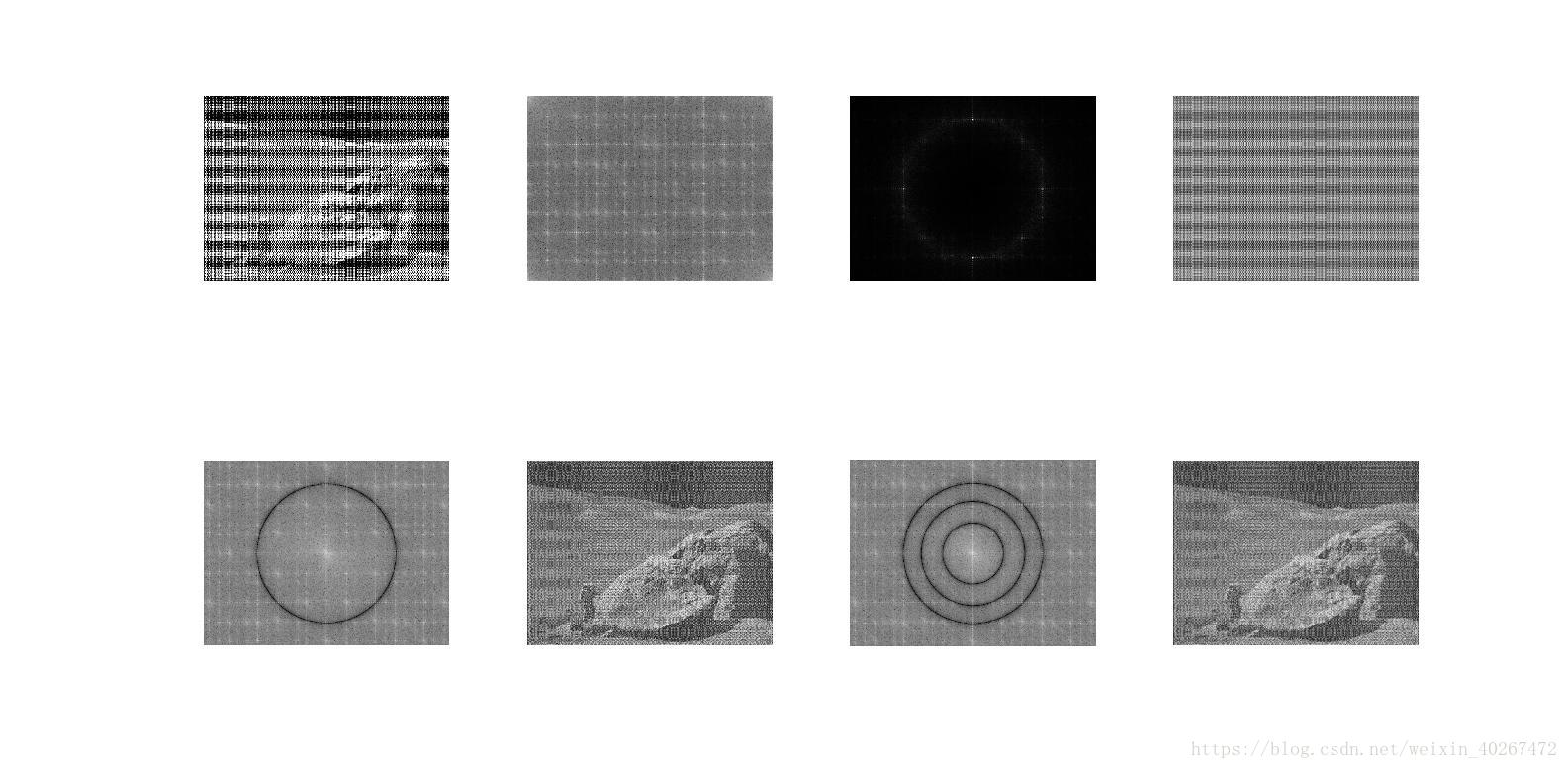
(1)第一步,提取干扰模式的主频率成分。
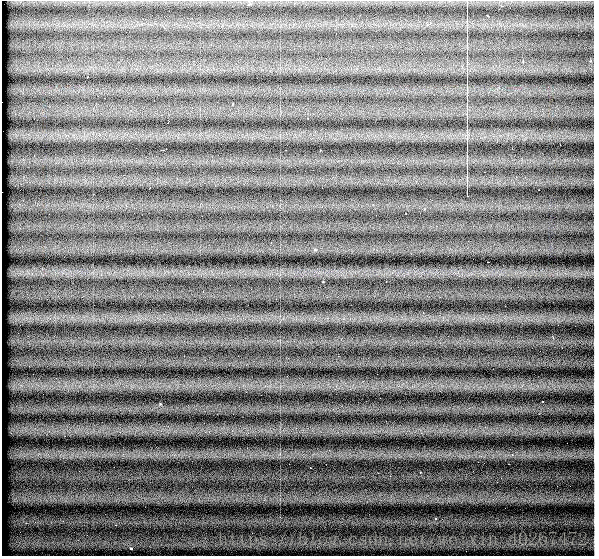
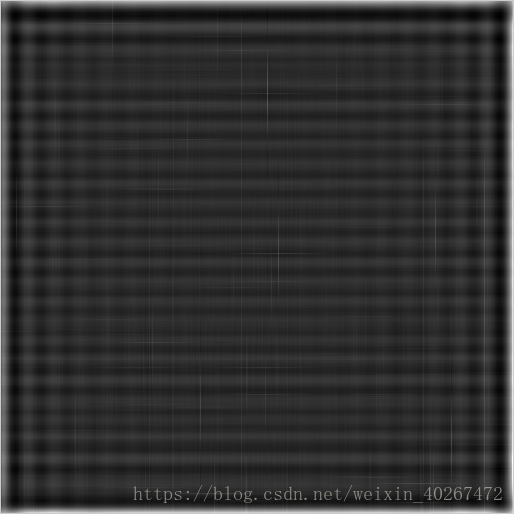
通过观察傅立叶变换后的频谱图,也叫功率图,我们首先就可以看出,图像的能量分布,如果频谱图中暗的点数更多,那么实际图像是比较柔和的(因为各点与邻域差异都不大,梯度相对较小),反之,如果频谱图中亮的点数多,那么实际图像一定是尖锐的,边界分明且边界两边像素差异较大的。对频谱移频到原点以后,可以看出图像的频率分布是以原点为圆心,对称分布的。将频谱移频到圆心除了可以清晰地看出图像频率分布以外,还有一个好处,它可以分离出有周期性规律的干扰信号,比如正弦干扰,一副带有正弦干扰,移频到原点的频谱图上可以看出除了中心以外还存在以某一点为中心,对称分布的亮点集合,这个集合就是干扰噪音产生的,这时可以很直观的通过在该位置放置带阻滤波器消除干扰。
如图5为“水星6号”飞船拍摄的活性地形图像,图6为周期干扰的傅里叶频谱(由美国国家航空航天局提供),观察频谱,在每个尖峰处设一陷波带通滤波器H(u,v),即设置H(u,v)只可通过与干扰模式相关的成分,如图7所示,中间使用理想型高通滤波器和“+”型带阻滤波器,四角使用理想型带阻陷波滤波器。通过下式计算干扰噪声模式的傅里叶变换:

其中,G(u,v)为被污染图像的傅里叶变换。
然后通过傅里叶逆变换获得通过的噪声干扰,如图8所示。

图5“水星6号”飞船拍摄的活性地形图像
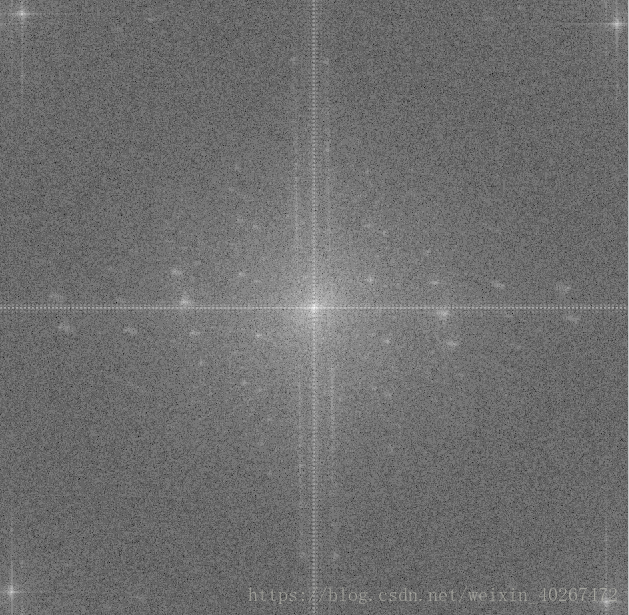
图6 周期干扰的傅里叶频谱(由美国国家航空航天局提供)
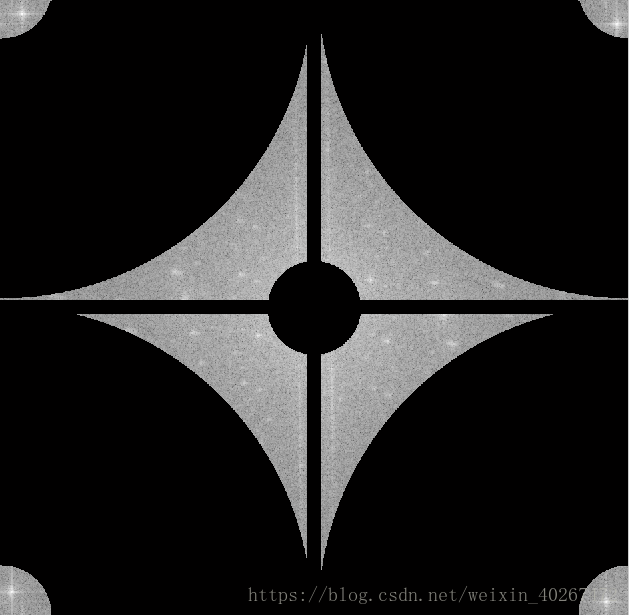
图7 叠加在图6的陷波带通滤波器
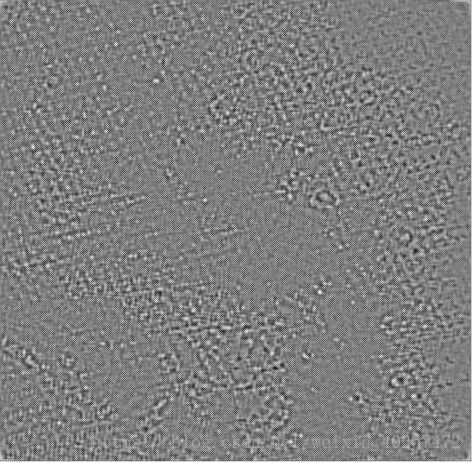
图8 滤波后图像的傅里叶逆变换,在空间域显示噪声模式
(2)从受污染的图像g(x,y)减去模式得到f(x,y)是很简单的,但是这个滤波过程通常只会得到真实干扰模式的近似值。在噪声
 的估计中不存在的那些分量的影响可以被最小化,即通过从g(x,y)减去的加权来得到f(x,y)的估计值,如下所示:
的估计中不存在的那些分量的影响可以被最小化,即通过从g(x,y)减去的加权来得到f(x,y)的估计值,如下所示:

其中,
 是的估计值,w(x,y)为加权函数。
是的估计值,w(x,y)为加权函数。
此过程的目的就是选取加权函数,使得估计值在每一点(x,y)的指定领域的方差最小。考虑点(x,y)的尺寸为a*b的领域,假设w(x,y)在整个领域内保持不变(详细参考书p200),则w(x,y)解为:
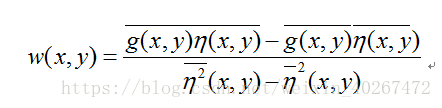
利用上述两个式子来获得复原图像,详细可见程序optimum_notch.m。如果w(x,y)在某一领域内被假定为常量,则不必再像法1一样在图像中计算对应每对x,y值的函数值,而是在每个非重叠领域的一点(一般为中心点)计算w(x,y)值,然后处理该领域内包含的所有图像点,如法2,3,这样算法效率会搞一点。对于边界处理,可采用对称镜像填充法、零填充法等,这里采用了对称镜像填充法。
(实验分别使用理想滤波器、高斯滤波器和巴特沃斯滤波器进行滤波比较,以及a和b设置的相关实验,具体参看github)
最佳陷波滤波器(傅里叶变换,matlab实现)1基本概念1.1频域滤波步骤小结 在频域中的滤波是简单明了的。它包含如下步骤: (1)给定一幅大小为M*N的输入图像f(x,y),选择填充参数P,Q,典型地,我们选择P=2M和Q=2N。 (2)对f(x,y)添加必要数量的0,形成大小为P*Q的填充后的图像fp(x,y)。 (3)用(-1)x+y乘以fp(x,y)移到其变换的中心。 ...
1
最佳
陷波
滤波实现
1.1
最佳
陷波
滤波原理及步骤
最佳
陷波
滤波的可以良好地处理一个以上的干扰分量或者多个周期性的噪声,相比于其他的滤波方法,
最佳
陷波
滤波可以最小化复原的估计值f ̂(x,y)的局部方差。
最佳
陷波
滤波可以分为两步:屏蔽干扰的主要成分,然后从被污染的图像中减去该模式的一个可变的加权部分。
首先第一步是提取干扰模式中的主频率分量。空间域中的噪音的相对模式可由下式获得:
H_NP (u,v)的形式需要多方面判断哪些是噪声干扰等。
第二步是从被污染的图像中减去该模式的一个可变的加权部分,其用公
5.运行注意事项:
使用matlab2021a或者更高版本测试,运行里面的Runme_.m文件,不要直接运行子函数文件。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。
具体可观看提供的操作录像视频跟着操作。
使用频率域滤波降低周期噪声
陷波
滤波深入介绍
零相移
滤波器
必须关于原点(频率矩形中心)对称,中以为(u0,v0)(u_0, v_0)(u0,v0)的
陷波
滤波器
传递函数在(−u0,−v0)(-u_0, -v_0)(−u0,−v0)位置必须有一个对应的
陷波
。
陷波
带阻
滤波器
传递函数可用中心被平移到
陷波
滤波中心的高通
滤波器
函数的乘积来产生
HNR(u,v)=∏k=1QHk
图像退化是由一个退化函数H(u,v)+一个噪声产生N(u,v)的g(x,y)。图像复原的目的是获得关于原始图像的近似估计。通常我们希望我们估计的图像能极可能的接近原始图像,并且H和N的信息知道的越多,则得到的图像就越接近原始图像。
空间域的退化图像和
频域
率的退化图像:
图像退化或者复原的模型
输入一幅图像f(x,y),经过退化函数H以及噪声变成g(x,y),然后复原变成f帽(x,y)。
这里面...
测试图像:moon.yuv (宽464,高538,4:4:4取样)
要求:(1) 调用1-D FFT模块实现2-D FFT
(2) 封装2-D FFT函数,通过调用2-D FFT实现2-D IDFT
频率域
陷波
滤波
测试图像:moon.yuv (宽464 高538)
实验平台:Visu
al
C++
实验方法:频率域
陷波
滤波。具体要求如下:
陷波
滤波:
f(...
(https://zhuanlan.zhihu.com/p/66962045 across说的课程)
在飞控领域中,主要针对飞行器在某一个高频点幅值较大,换句话来说,就是常见的飞机有共振的现象时。首先考虑通过机械减震或IMU减震来消除这种现象,若实际很难做到就考虑软件方面处理。
要使用
陷波
滤波器
,首先了解信号的频谱。假设已知有用信号在30Hz以内,在80Hz处有一个高频干扰。
此时如果使用低通(
设计
一个二阶IIR),其幅度响应如下图):...
陷波
器是一种特殊的带阻
滤波器
,其阻带在理想情况下只有一个频率点,因此也被称为点阻
滤波器
。这种
滤波器
主要用于消除某个特定频率的干扰,由于
陷波
器频率特性的特殊性,它除了可采用双线性变换进行
设计
外,还可以采用所谓零极点配置的方法进行
设计
。
一个理想的
陷波
滤波器
的频率特性要在消除的信号频率点处,其值等于零;而在其他频率点处,其值等于1。由于数字
滤波器
的频率特性就是其单位冲激响应在单位圆上的Z变换,因此只需要在单位圆上相应于所需带阻
滤波器
阻带位置的频率处设置零点,就可以使
滤波器
的频率特性...