海康工业机器人软件下载地址:
[https://www.hikrobotics.com/cn/machinevision/service/download?module=0]
,打开后如下图所示,找到所需要的的版本。

找到Linux下载安装包,我这里下载的是MVS V2.1.0(Linux)版本。

点击下载,开始下载安装包,下载完成将安装包移到u盘上,再插入到树莓派上(这里我用的VNC软件去操控树莓派)。新建了一个文件linux-mvs,将下载好后的安装包放入此文件夹下
将下载好的文件解压后得到下列文件,这其中,树莓派选择文件名中armfhf的两个文件,如果是linux-PC端可以选择x86_84,jetson选择aarch64,i386是32位的linux-PC.在linux安装MVS软件,有两种方式使用一种即可,这里我只介绍我使用的安装方法。
打开终端,通过cd 命令进入到当前文件夹,准备解压文件。
通过dpkg包安装
打开终端,通过cd 命令进入到当前文件夹,运行如下命令:sudo dpkg –i MVS-2.1.0_armhf_20201228.deb,此时将MVS软件安装在了/opt/MVS路径下:
到这一步,在树莓派上安装MVS就安装成功了!
使用python程序打开海康工业相机,需要调用MVS软件中的.py文件,具体路径在在/opt/MVS/Samples/armhf/Python/MvImport,打开这个文件中的MvCameraControl_class.py文件,查看这个语句,MvCamCtrldll,这是打开工业相机的关键,是调用了动态链接库

这个语句它默认调用的是/opt/MVS/lib/armhf中的文件,实际程序运行中最大的问题也在这里,树莓派与Linux系统的调用不同之处也在这里,树莓派并不会自动添加MVS调用的动态链接路径,需要我们手动添加动态链接的路径。为了防止调用失败,出现文件无法查询 比如如下的错误:
OSError:libGCBase_gcc46_v3_0.so:cannot open shared object file:No such file or directory。
有则我们需要对树莓派的/etc/ld.so.conf.d 目录下的文件进行修改,添加我们想要路径。
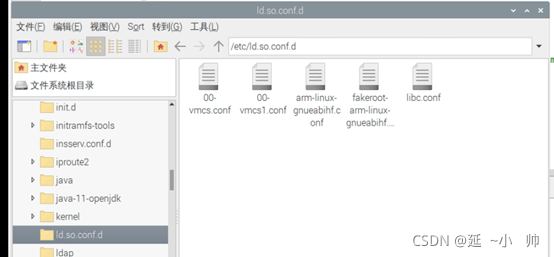
可以新建文件,或者在已有的文件中,添加我们需要的路径即可。如图所示:

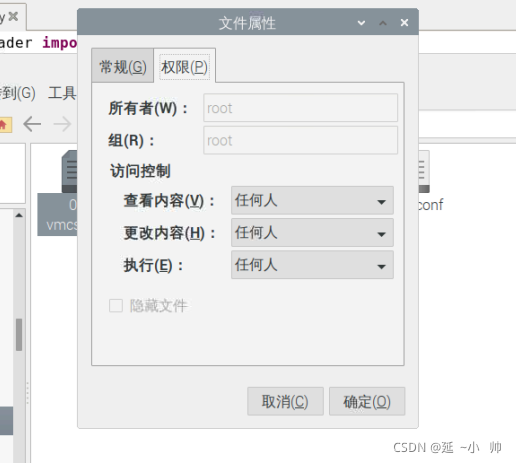
添加完成后,保存文件。在修改文件时或者查询文件时,若出现权限不够问题,利用“chmod 777 /文件名”命令去修改文件权限。即可改为权限为任何人,这样就可以任意修改文件了:
在保存完成后,打开终端,输入sudo ldconfig 命令,这样就完成配置了。
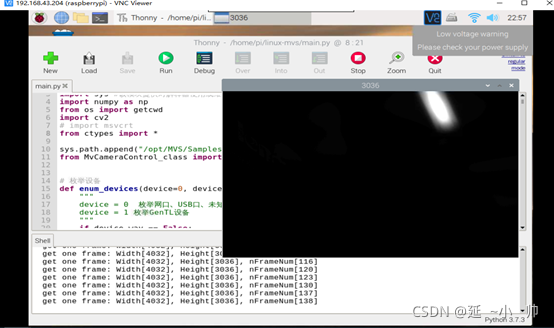
最后运行程序,可以看到成功打开了相机。
在jetson nano 下打开此相机,安装MVS安装包顺序与在树莓派下安装的流程不变,但安装包变为安装sudo dpkg –i MVS-2.1.0_aarch64_20201228.deb。
程序中也要修改这条语句sys.path.append("/opt/MVS/Samples/armhf/Python/MvImport “)将其改为sys.path.append(”/opt/MVS/Samples/aarch/Python/MvImport ")(
具体以实际文件名称为主!
)
然后检查/etc/ld.so.conf.d 目录下的文件,是否有aarch64的相关文件,有则无需修改,没有则参照树莓派手动添加动态链接的路径的方法。
之后便可以运行程序了,若在运行程序中出现 Failed to load modile “Canberra-get-module”
解决方案:打开终端,输入sudo apt-get install libcanberra-gtk-module。相机打开运行如下:
程序主要代码如下:
import sys
from ctypes import *
import os
import numpy as np
import time
import cv2
sys.path.append("/opt/MVS/Samples/armhf/Python/MvImport")
from MvCameraControl_class import *
class HKCamera():
def __init__(self, CameraIdx=0, log_path=None):
deviceList = self.enum_devices()
self.camera = self.open_camera(deviceList, CameraIdx, log_path)
self.start_camera()
def __del__(self):
if self.camera is None:
return
ret = self.camera.MV_CC_StopGrabbing()
if ret != 0:
raise Exception("stop grabbing fail! ret[0x%x]" % ret)
ret = self.camera.MV_CC_CloseDevice()
if ret != 0:
raise Exception("close deivce fail! ret[0x%x]" % ret)
ret = self.camera.MV_CC_DestroyHandle()
if ret != 0:
raise Exception("destroy handle fail! ret[0x%x]" % ret)
@staticmethod
def enum_devices(device=0, device_way=False):
device = 0 枚举网口、USB口、未知设备、cameralink 设备
device = 1 枚举GenTL设备
if device_way == False:
if device == 0:
cameraType = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_UNKNOW_DEVICE | MV_1394_DEVICE | MV_CAMERALINK_DEVICE
deviceList = MV_CC_DEVICE_INFO_LIST()
ret = MvCamera.MV_CC_EnumDevices(cameraType, deviceList)
if ret != 0:
raise Exception("enum devices fail! ret[0x%x]" % ret)
return deviceList
else:
elif device_way == True:
def open_camera(self, deviceList, CameraIdx, log_path):
camera = MvCamera()
stDeviceList = cast(deviceList.pDeviceInfo[CameraIdx], POINTER(MV_CC_DEVICE_INFO)).contents
if log_path is not None:
ret = self.camera.MV_CC_SetSDKLogPath(log_path)
if ret != 0:
raise Exception("set Log path fail! ret[0x%x]" % ret)
ret = camera.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
else:
ret = camera.MV_CC_CreateHandleWithoutLog(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
ret = camera.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
raise Exception("open device fail! ret[0x%x]" % ret)
return camera
def start_camera(self):
stParam = MVCC_INTVALUE()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE))
ret = self.camera.MV_CC_GetIntValue("PayloadSize", stParam)
if ret != 0:
raise Exception("get payload size fail! ret[0x%x]" % ret)
self.nDataSize = stParam.
nCurValue
self.pData = (c_ubyte * self.nDataSize)()
self.stFrameInfo = MV_FRAME_OUT_INFO_EX()
memset(byref(self.stFrameInfo), 0, sizeof(self.stFrameInfo))
self.camera.MV_CC_StartGrabbing()
def get_Value(self, param_type, node_name):
:param cam: 相机实例
:param_type: 获取节点值得类型
:param node_name: 节点名 可选 int 、float 、enum 、bool 、string 型节点
:return: 节点值
if param_type == "int_value":
stParam = MVCC_INTVALUE_EX()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE_EX))
ret = self.camera.MV_CC_GetIntValueEx(node_name, stParam)
if ret != 0:
raise Exception("获取 int 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stParam.nCurValue
elif param_type == "float_value":
stFloatValue = MVCC_FLOATVALUE()
memset(byref(stFloatValue), 0, sizeof(MVCC_FLOATVALUE))
ret = self.camera.MV_CC_GetFloatValue(node_name, stFloatValue)
if ret != 0:
raise Exception("获取 float 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stFloatValue.fCurValue
elif param_type == "enum_value":
stEnumValue = MVCC_ENUMVALUE()
memset(byref(stEnumValue), 0, sizeof(MVCC_ENUMVALUE))
ret = self.camera.MV_CC_GetEnumValue(node_name, stEnumValue)
if ret != 0:
raise Exception("获取 enum 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stEnumValue.nCurValue
elif param_type == "bool_value":
stBool = c_bool(False)
ret = self.camera.MV_CC_GetBoolValue(node_name, stBool)
if ret != 0:
raise Exception("获取 bool 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stBool.value
elif param_type == "string_value":
stStringValue = MVCC_STRINGVALUE()
memset(byref(stStringValue), 0, sizeof(MVCC_STRINGVALUE))
ret = self.camera.MV_CC_GetStringValue(node_name, stStringValue)
if ret != 0:
raise Exception("获取 string 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stStringValue.chCurValue
else:
return None
def set_Value(self, param_type, node_name, node_value):
:param cam: 相机实例
:param param_type: 需要设置的节点值得类型
float:
enum: 参考于客户端中该选项的 Enum Entry Value 值即可
bool: 对应 0 为关,1 为开
string: 输入值为数字或者英文字符,不能为汉字
:param node_name: 需要设置的节点名
:param node_value: 设置给节点的值
:return:
if param_type == "int_value":
ret = self.camera.MV_CC_SetIntValueEx(node_name, int(node_value))
if ret != 0:
raise Exception("设置 int 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "float_value":
ret = self.camera.MV_CC_SetFloatValue(node_name, float(node_value))
if ret != 0:
raise Exception("设置 float 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "enum_value":
ret = self.camera.MV_CC_SetEnumValue(node_name, node_value)
if ret != 0:
raise Exception("设置 enum 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "bool_value":
ret = self.camera.MV_CC_SetBoolValue(node_name, node_value)
if ret != 0:
raise Exception("设置 bool 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "string_value":
ret = self.camera.MV_CC_SetStringValue(node_name, str(node_value))
if ret != 0:
raise Exception("设置 string 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
def set_exposure_time(self, exp_time):
self.set_Value(param_type="float_value", node_name="ExposureTime", node_value=exp_time)
def get_exposure_time(self):
return self.get_Value(param_type="float_value", node_name="ExposureTime")
def get_image(self, width=None):
:param cam: 相机实例
:active_way:主动取流方式的不同方法 分别是(getImagebuffer)(getoneframetimeout)
:return:
ret = self.camera.MV_CC_GetOneFrameTimeout(self.pData, self.nDataSize, self.stFrameInfo, 1000)
if ret == 0:
image = np.asarray(self.pData).reshape((self.stFrameInfo.nHeight, self.stFrameInfo.nWidth))
if width is not None:
image = cv2.resize(image, (width, int(self.stFrameInfo.nHeight * width / self.stFrameInfo.nWidth)))
return image
else:
return None
def show_runtime_info(self, image):
exp_time = self.get_exposure_time()
cv2.putText(image, ("exposure time = %1.1fms" % (exp_time * 0.001)), (20, 50), cv2.FONT_HERSHEY_SIMPLEX, 0.5, 255, 1)
if __name__ == '__main__':
camera = HKCamera()
try:
while True:
image = camera.get_image(width=800)
if image is not None:
camera.show_runtime_info(image)
cv2.imshow("", image)
key = cv2.waitKey(50) & 0xFF
if key == ord('e') or key == ord('E'):
cv2.destroyAllWindows()
break
except Exception as e:
print(e)
linux下添加动态链接库路径的方法:https://www.cnblogs.com/ostin/p/9193029.html。
海康Camera MVS Linux SDK二次开发封装ROS packge过程记录(c++):https://blog.csdn.net/weixin_41965898/article/details/116801491。
python调用海康工业相机并用opencv显示(整体实现,在windows下):https://blog.csdn.net/qq_39570716/article/details/114066097?spm=1001.2014.3001.5501。
该系统是官方Raspbian-buster-full,安装的OpenCV版本为3.4.3,系统镜像4.86G,压缩后2.09G,直接烧录到TF卡中就可以使用OpenCV,系统已设置好,上手就能用,有详细的使用文档,包括密码和各类软件的说明使用,能够马上上手使用,兼容4及4以下的树莓派设备。
将该系统镜像写入TF卡中,TF卡的大小可以为8G、16G等,只有大于4G的都可以。文件中有系统的详细说明和使用方法,包括用户密码、软件的使用、和windows系统的交互方法等,能够让你很快地上手。
里面包含5个wheel:
opencv_python-3.4.3.18-cp37-cp37m-linux_armv7l.whl
opencv_python-4.1.1.26-cp37-cp37m-linux_armv7l.whl
opencv_python-4.1.1.26-cp35-cp35m-linux_armv7l.whl
opencv_python-4.1.1.26-cp37-cp37m-linux_armv6l.whl
opencv_python-4.1.1.26-cp37-cp37m-linux_armv7l.whl
下载之后选择里面的 MVS-1.0.0_aarch64_20190708.tar.gz 这个是64位架构的 ARMHF是32位架构上使用的
解压之后 如果直接安装的话因为ubuntu18.04删除了
/etc/rc.local
直接安装的话会报错 首先新建一个rc.local文件
root用户下
to...
环境:树莓派 Ubuntu系统
编程环境:Python3.7 Node(忘了版本了,都可以,最好稳定版本)
需要安装的模块:Python端:cv2 websockets fastapi等;Node端:主要是ws(用来传输视频流)
安装可以看网上的文章,很多有写,不过树莓派这里避坑:树莓派进入是pi用户,需要才能切换为root用户,安装Python模块时如果在用户下安装,用用户运行是是没有的,会报错误。另外,安装模块时似乎不能用安装,需要用它自带的安装,不过不知道是不是只有我这里才是这样的。......
2.2.1 使用海康威视官方软件SDK(Ubuntu版安装失败,遂使用Winows版)查相机IP及账号密码
2.2.2 Windows 中在网络适配器设置IPV4与摄像头同一个网络,IE浏览器192.168.xxx.xxx,输入账号密码登录,安装插件即可得到视频
不想再安装庞大的MVS,先下载Linux runtime包 机器视觉工业相机SDK V3.2.0版本Runtime组件包(Linux).zip:
海康机器人-机器视觉-下载中心
然后解压出来
接着执行下面命令安装Lib:
sudo dpkg -i MvCamCtrlSDK_Runtime-3.2.0_armhf_20210915.deb
第一次安装会让设置一个基础路径,我设置的是 : /opt/MVS
可能是我不懂啊,安装后找不到include文件夹,无奈,还是得下载MVS,.
我们知道Linux内存管理是以页为单位进行的,对内存的管理是通过伙伴系统进行。
从Linux内存管理框架图可知,页面分配器是其他林林总总内存操作的基础。
这也是为什么在介绍了《Linux内存管理 (1)物理内存初始化》、《Linux内存管理 (2)页表的映射过程》、《Linux内存管理 (3...
ffplay rtsp://xxxx:xxxxxxxx@192.168.1.200:554/h264/ch1/sub/av_stream
xxxx:xxxxxxxxx是账户名和密码,@后面是摄像仪的IP地址,后面那个:554是端口号,可以不用,默认就是554,不用改。 sub可以换成main,一个是主码流,一个子码流,分辨率和带宽不一样。
另外,经常出现
Invalid data found when processing input
authorization failed 等..

