Bayes估计需要已知后验分布函数f(θ|x1,…,xN),而最大似然估计则需要已知似然函数f(x1,…,xN|θ)。但是,在很多实际情况下,它们是未知的。另外,最大似然估计有时会导致非线性估计问题,不容易求解。因此,不需要先验知识、并且容易实现的线性估计方法就显得十分有吸引力。线性均方估计和最小二乘估计就是这样两类参数估计方法。
线性均方估计的规则,就是把估计量(θ)构造成观测量(x)的线性函数,同时要求估计量的均方误差最小。
在线性均方(linear mean squares,LMS)估计中,待定的参数估计子被表示为观测数据的线性加权和,已知观测样本为xi(i=1,...,N),则参数θ的估计值可以写为
估计量的均方误差为
线性均方估计通过选择最佳系数ai和b,使得估计量的均方误差最小。
均方误差分别对ai和b求偏导,并令结果等于0
整理可得:
正交性原理可用文字叙述如下:均方误差最小,当且仅当估计误差e正交于每一个给定的观测数据xi,其中i=1,…,N。
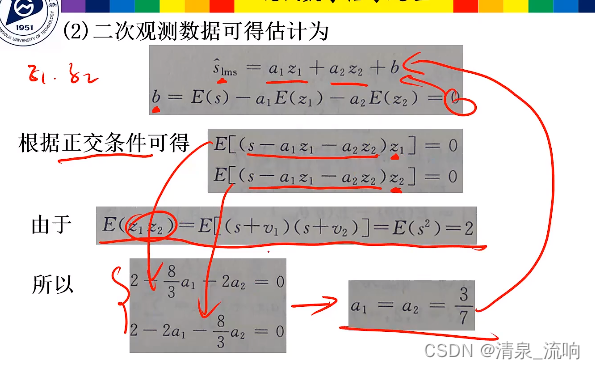
例:设观测模型为zi=s+vi(i=1,2,.…),其中随机参量s以等概率取{-2,-1,0,1,2)诸值,噪声干扰vi以等概率取{-1,0,1)诸值,且E[svi]=0,E[vivj]=
 ,试根据一次、二次、三次观测数据求参量s的线性最小均方估计。
,试根据一次、二次、三次观测数据求参量s的线性最小均方估计。
解:根据给定的条件可得
均值:E(s)=(-2-1+0+1+2)/5=0
均方值:E(s^2)=[(-2)×(-2)+(-1)×(-1)+0×0+1×1+2×2]/5=2
方差:
 =E(s^2)=[(-2)×(-2)+(-1)×(-1)+0×0+1×1+2×2]/5=2
=E(s^2)=[(-2)×(-2)+(-1)×(-1)+0×0+1×1+2×2]/5=2
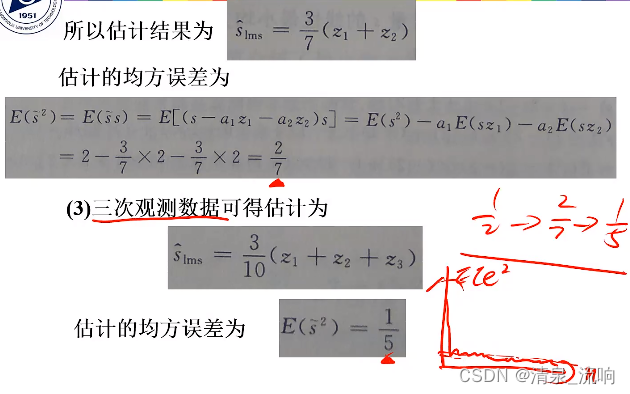
随着样本数的增多,估计的均方误差逐渐减小最终达到一个稳定的值。
参考视频与文献:
https://www.bilibili.com/video/BV1wS4y1D7ng?p=4&vd_source=77c874a500ef21df351103560dada737
现代信号处理(第三版)张贤达(编著)
五、
线性
均方
估计
(LMS)
贝叶斯
估计
需要已知后验概率分布函数;最大似然
估计
需要知道似然函数,但是在很多情况下他们都是未知的。因此,不需要先验知识且容易实现的
线性
估计
方法就显得十分有吸引力;
线性
均方
估计
和最小二乘
估计
就是这样两类
参数估计
方法。
1、在
线性
均方
估计
中,待定的
参数估计
子被表示为观测数据的
线性
加权和,即
《
线性
估计
》主要介绍状态空间模型的有限维
线性
系统的
估计
问题,涵盖了目前我们熟知的维纳滤波和卡尔曼滤波这一领域的许多方面。《
线性
估计
》的三个独特之处是:第一,将几何学的观点渗透于分析中;第二,侧重于将许多算法用平方根/阵列的形式给出;第三,强调了在解决自适应滤波、
估计
和控制这些相关问题时的等价性和对偶性概念。
资源为pdf版本,清晰度尚可。如果要打印的话建议下载我的资源中djvu格式的版本的
线性
估计
。
z的数学期望为0z的数学期望为0z的数学期望为0
以上为最终的
估计
公式,C代表斜方差,下面进行分析与推广以上为最终的
估计
公式,C代表斜方差,下面进行分析与推广以上为最终的
估计
公式,C代表斜方差,下面进行分析与推广
LMMSE性质
对于一个系统,在给予一定的输入,那么通常都会产生相对应的输出。在实际的系统中,这样的输出必然伴随着噪声,这样被噪声污染的输出通常是传感器的输出信号,也叫观测信号
同时,如果系统的模型是清晰的,我们可以通过严格的
理论
计算来得到真实值,通过作差的方式变把噪声去除了。
然而在实际的系统中,我们对整个系统的物理模型通常是未知的或者有一些参数未知,也可能是模型不准确,某些参数值有一定的偏差。因此,我们为了得到真实的信号,就需要利用观测信
【检测与
估计
理论
(Detection and Estimation Theory)】二、最小方差无偏
估计
(Minimum Variance Unbiased Estimation)
最佳
线性
无偏
估计
BLUE
1、定义:
线性
估计
是
参数估计
最重要的一类,应用 广泛。如果对参数x 的
估计
可以表示成为量测信 息的
线性
函数就是
线性
估计
。而
线性
无偏最小方差
估计
称为BLUE ( Best Linear Unbiased Estimation)。
2、定理:如果量测信息的协方差矩阵是非奇异的,对于任意分布的量测 z 和参数 x,有
线性
无偏最小方差
估计
为:
x^BLUE=x...
基于DA(数据融合)的最小
均方
误差
估计
算法是一种利用多个传感器测量数据进行
估计
的方法,其目的是提高
估计
精度和鲁棒性。
该算法首先将多个传感器的测量数据融合为一个数据集,然后利用该数据集进行
估计
。在
估计
过程中,该算法采用最小
均方
误差准则,即选择使得误差平方和最小的
估计
值作为最终
估计
结果。
此外,该算法还可以利用卡尔曼滤波等技术对数据进行预处理,以进一步提高
估计
精度。

