


由粗到精学习LVI-SAM(九)VIS——visual_feature模块

小鹏汽车自动驾驶定位算法工程师
一、节点关系
回顾节点关系图:
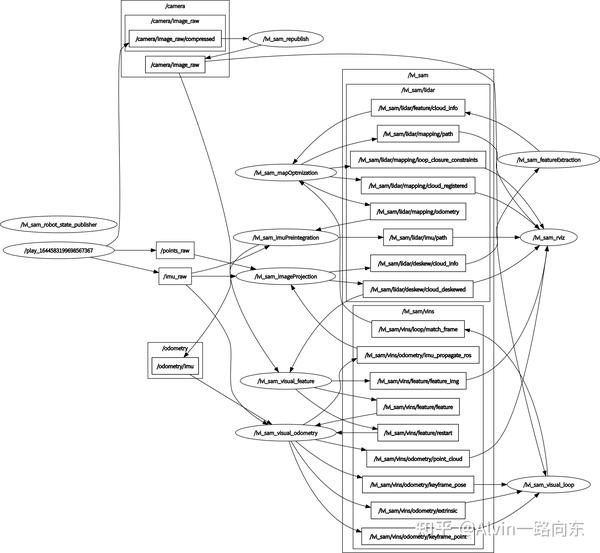
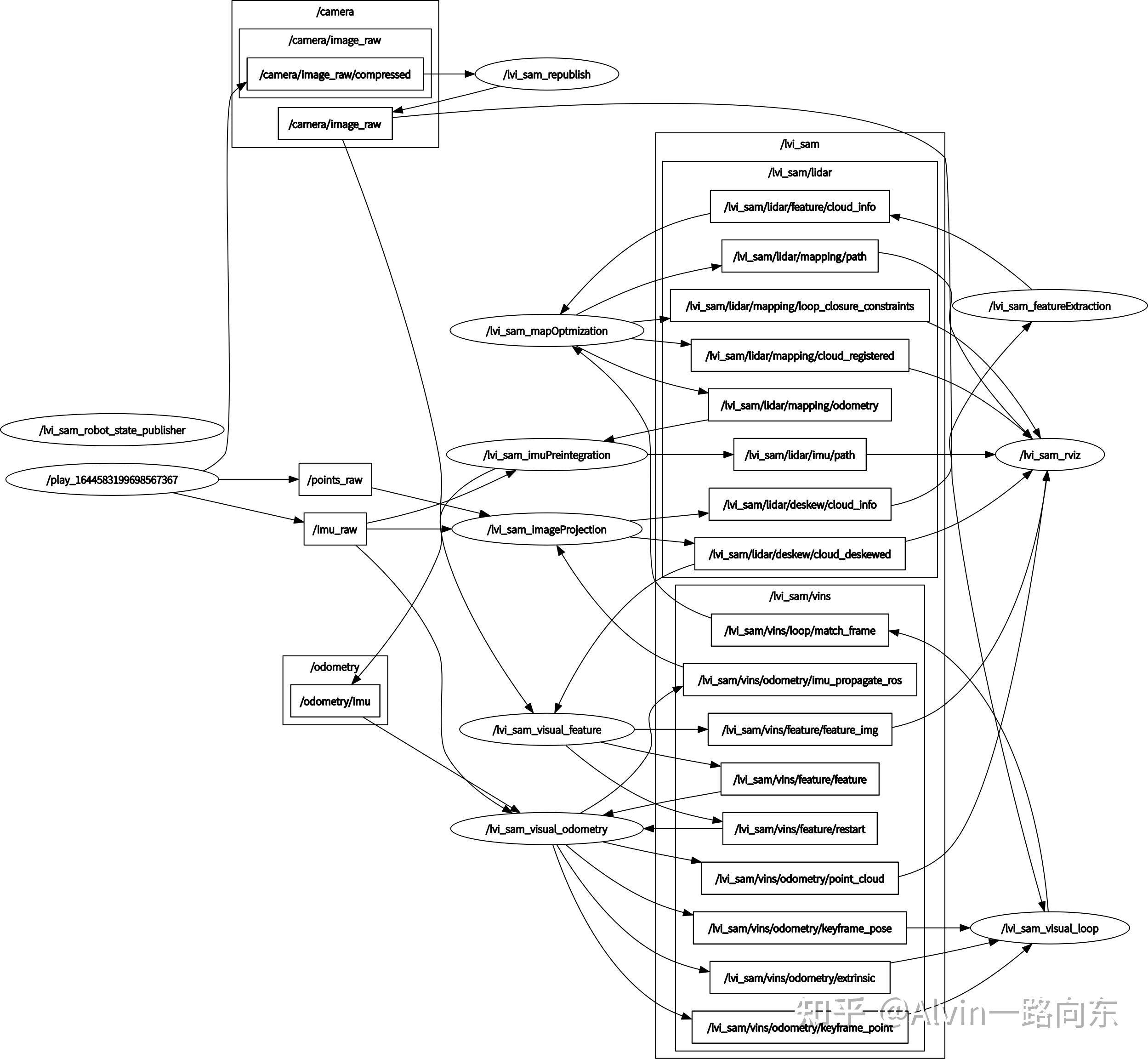
观察节点关系图可得,特征提取节点visual_feature订阅了2个话题:原始图片话题image_raw、去畸变点云话题cloud_deskewed。发布了3个话题:标记特征点的图片话题feature_img,自定义特征话题feature,特征提取系统重启标志话题restart。其中标记特征点的图片话题用于可视化。
二、主函数
int main(int argc, char **argv)
//// 初始化ROS
ros::init(argc, argv, "vins");
ros::NodeHandle n;
ROS_INFO("\033[1;32m----> Visual Feature Tracker Started.\033[0m");
//// 设置控制台日志显示信息
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Warn);
readParameters(n);
//// 读取相机参数
for (int i = 0; i < NUM_OF_CAM; i++)
trackerData[i].readIntrinsicParameter(CAM_NAMES[i]);
// load fisheye mask to remove features on the boundary
//// 对鱼眼相机,贴上掩膜防止提取边界特征点
if(FISHEYE)
for (int i = 0; i < NUM_OF_CAM; i++)
trackerData[i].fisheye_mask = cv::imread(FISHEYE_MASK, 0);
if(!trackerData[i].fisheye_mask.data)
ROS_ERROR("load fisheye mask fail");
ROS_BREAK();
ROS_INFO("load mask success");
// initialize depthRegister (after readParameters())
//// 初始化深度注册器
depthRegister = new DepthRegister(n);
// subscriber to image and lidar
//// 订阅img话题和去畸变点云话题
ros::Subscriber sub_img = n.subscribe(IMAGE_TOPIC, 5, img_callback);
ros::Subscriber sub_lidar = n.subscribe(POINT_CLOUD_TOPIC, 5, lidar_callback);
if (!USE_LIDAR)
sub_lidar.shutdown();
// messages to vins estimator
//// 发布自定义特征话题,含特征点图片话题,重启标志位话题
pub_feature = n.advertise<sensor_msgs::PointCloud>(PROJECT_NAME + "/vins/feature/feature", 5);
pub_match = n.advertise<sensor_msgs::Image> (PROJECT_NAME + "/vins/feature/feature_img", 5);
pub_restart = n.advertise<std_msgs::Bool> (PROJECT_NAME + "/vins/feature/restart", 5);
// two ROS spinners for parallel processing (image and lidar)
//// 两个线程共同处理
ros::MultiThreadedSpinner spinner(2);
spinner.spin();
return 0;
三、回调函数
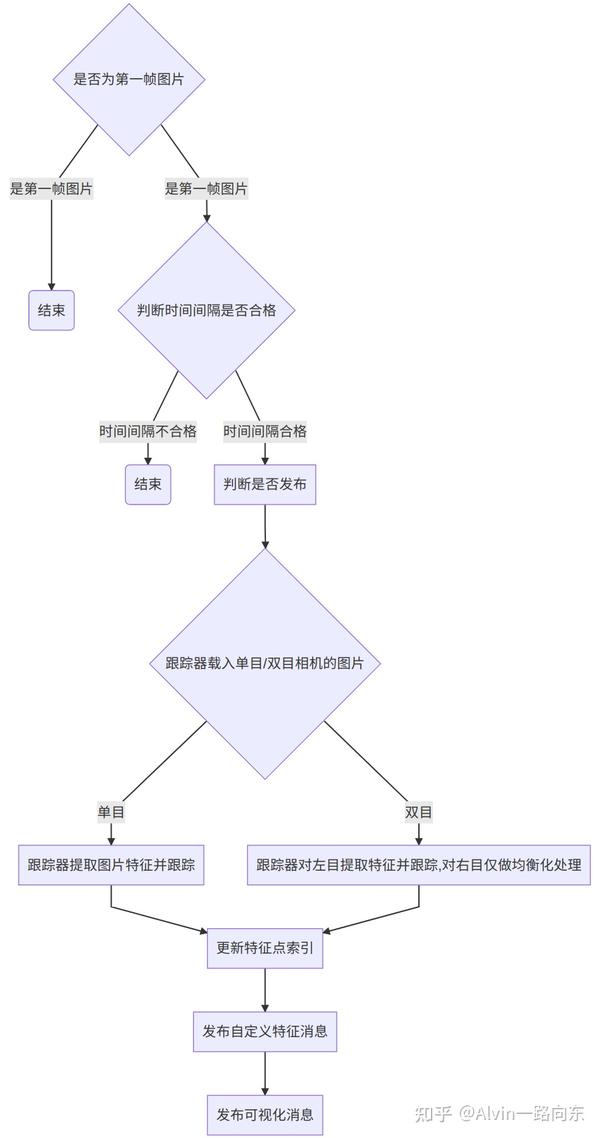
3.1 订阅图片的回调函数img_callback()

void img_callback(const sensor_msgs::ImageConstPtr &img_msg)
double cur_img_time = img_msg->header.stamp.toSec();
//// 第一帧图像则直接返回
if(first_image_flag)
first_image_flag = false;
first_image_time = cur_img_time;
last_image_time = cur_img_time;
return;
//// 如果当前帧与上一帧间隔有问题,则跟踪不稳定,清空、重新初始化
//// detect unstable camera stream
if (cur_img_time - last_image_time > 1.0 || cur_img_time < last_image_time)
ROS_WARN("image discontinue! reset the feature tracker!");
first_image_flag = true;
last_image_time = 0;
pub_count = 1;
std_msgs::Bool restart_flag;
restart_flag.data = true;
pub_restart.publish(restart_flag);
return;
last_image_time = cur_img_time;
// frequency control 频率控制 默认pub频率20
//// 每一帧图片都要处理,但不一定要全都pub,因为所有pub出去的内容都会增加后端优化的规模
if (round(1.0 * pub_count / (cur_img_time - first_image_time)) <= FREQ)
PUB_THIS_FRAME = true;
// reset the frequency control
if (abs(1.0 * pub_count / (cur_img_time - first_image_time) - FREQ) < 0.01 * FREQ)
first_image_time = cur_img_time;
pub_count = 0;
PUB_THIS_FRAME = false;
//// 提取照片个,格式转换
cv_bridge::CvImageConstPtr ptr;
if (img_msg->encoding == "8UC1")
sensor_msgs::Image img;
img.header = img_msg->header;
img.height = img_msg->height;
img.width = img_msg->width;
img.is_bigendian = img_msg->is_bigendian;
img.step = img_msg->step;
img.data = img_msg->data;
img.encoding = "mono8";
ptr = cv_bridge::toCvCopy(img, sensor_msgs::image_encodings::MONO8);
ptr = cv_bridge::toCvCopy(img_msg, sensor_msgs::image_encodings::MONO8);
cv::Mat show_img = ptr->image;
TicToc t_r;
for (int i = 0; i < NUM_OF_CAM; i++)
ROS_DEBUG("processing camera %d", i);
//// 每个相机都有一个跟踪实例
//// 对于单目相机:提取特征+光流跟踪 对于双目相机:左目按照单目处理,右目灰度均衡化处理或仅保存
if (i != 1 || !STEREO_TRACK)
trackerData[i].readImage(ptr->image.rowRange(ROW * i, ROW * (i + 1)), cur_img_time);
if (EQUALIZE)
cv::Ptr<cv::CLAHE> clahe = cv::createCLAHE();
clahe->apply(ptr->image.rowRange(ROW * i, ROW * (i + 1)), trackerData[i].cur_img);
trackerData[i].cur_img = ptr->image.rowRange(ROW * i, ROW * (i + 1));
#if SHOW_UNDISTORTION
trackerData[i].showUndistortion("undistrotion_" + std::to_string(i));
#endif
//// 更新特征点ID
for (unsigned int i = 0;; i++)
bool completed = false;
for (int j = 0; j < NUM_OF_CAM; j++)
if (j != 1 || !STEREO_TRACK)
completed |= trackerData[j].updateID(i);
if (!completed)
break;
if (PUB_THIS_FRAME)
pub_count++;
//// 用pointcloud消息类型,这种消息类型包含下面各种通道:归一化平面坐标, 关键点索引,关键点像素坐标,关键点速度,关键点的深度
sensor_msgs::PointCloudPtr feature_points(new sensor_msgs::PointCloud);
sensor_msgs::ChannelFloat32 id_of_point;
sensor_msgs::ChannelFloat32 u_of_point;
sensor_msgs::ChannelFloat32 v_of_point;
sensor_msgs::ChannelFloat32 velocity_x_of_point;
sensor_msgs::ChannelFloat32 velocity_y_of_point;
feature_points->header.stamp = img_msg->header.stamp;
feature_points->header.frame_id = "vins_body";
//// 记录每个相机的关键点id
vector<set<int>> hash_ids(NUM_OF_CAM);
for (int i = 0; i < NUM_OF_CAM; i++)
auto &un_pts = trackerData[i].cur_un_pts;
auto &cur_pts = trackerData[i].cur_pts;
auto &ids = trackerData[i].ids;
auto &pts_velocity = trackerData[i].pts_velocity;
for (unsigned int j = 0; j < ids.size(); j++)
//// 对于跟踪次数大于1的关键点
if (trackerData[i].track_cnt[j] > 1)
int p_id = ids[j];
hash_ids[i].insert(p_id);
geometry_msgs::Point32 p;
p.x = un_pts[j].x;
p.y = un_pts[j].y;
p.z = 1; //// 归一化平面上的点
feature_points->points.push_back(p);
id_of_point.values.push_back(p_id * NUM_OF_CAM + i);
u_of_point.values.push_back(cur_pts[j].x);
v_of_point.values.push_back(cur_pts[j].y);
velocity_x_of_point.values.push_back(pts_velocity[j].x);
velocity_y_of_point.values.push_back(pts_velocity[j].y);
feature_points->channels.push_back(id_of_point);
feature_points->channels.push_back(u_of_point);
feature_points->channels.push_back(v_of_point);
feature_points->channels.push_back(velocity_x_of_point);
feature_points->channels.push_back(velocity_y_of_point);
// get feature depth from lidar point cloud
//// 获取连续几帧聚合的点云
pcl::PointCloud<PointType>::Ptr depth_cloud_temp(new pcl::PointCloud<PointType>());
mtx_lidar.lock();
*depth_cloud_temp = *depthCloud;
mtx_lidar.unlock();
//// 通过聚合点云获取深度信息
sensor_msgs::ChannelFloat32 depth_of_points = depthRegister->get_depth(img_msg->header.stamp, show_img, depth_cloud_temp, trackerData[0].m_camera, feature_points->points);
feature_points->channels.push_back(depth_of_points);
// skip the first image; since no optical speed on frist image
//// 第一次跟踪的图片只有关键点坐标信息,没有速度信息,跳过
if (!init_pub)
init_pub = 1;
pub_feature.publish(feature_points);
// publish features in image
if (pub_match.getNumSubscribers() != 0)
ptr = cv_bridge::cvtColor(ptr, sensor_msgs::image_encodings::RGB8);
//cv::Mat stereo_img(ROW * NUM_OF_CAM, COL, CV_8UC3);
cv::Mat stereo_img = ptr->image;
for (int i = 0; i < NUM_OF_CAM; i++)
cv::Mat tmp_img = stereo_img.rowRange(i * ROW, (i + 1) * ROW);
cv::cvtColor(show_img, tmp_img, CV_GRAY2RGB);
for (unsigned int j = 0; j < trackerData[i].cur_pts.size(); j++)
if (SHOW_TRACK)
// track count
//// 如果设定SHOW_TRACK,在关键点上画圈,关键点跟踪次数越多,圆圈越绿,反之则越蓝
double len = std::min(1.0, 1.0 * trackerData[i].track_cnt[j] / WINDOW_SIZE);
cv::circle(tmp_img, trackerData[i].cur_pts[j], 4, cv::Scalar(255 * (1 - len), 255 * len, 0), 4);
} else {
// depth
//// 如果不设定SHOW_TRACK,则对有深度的关键点画绿圈,对没有深度的关键点画红圈
if(j < depth_of_points.values.size())
if (depth_of_points.values[j] > 0)
cv::circle(tmp_img, trackerData[i].cur_pts[j], 4, cv::Scalar(0, 255, 0), 4);
cv::circle(tmp_img, trackerData[i].cur_pts[j], 4, cv::Scalar(0, 0, 255), 4);
pub_match.publish(ptr->toImageMsg());
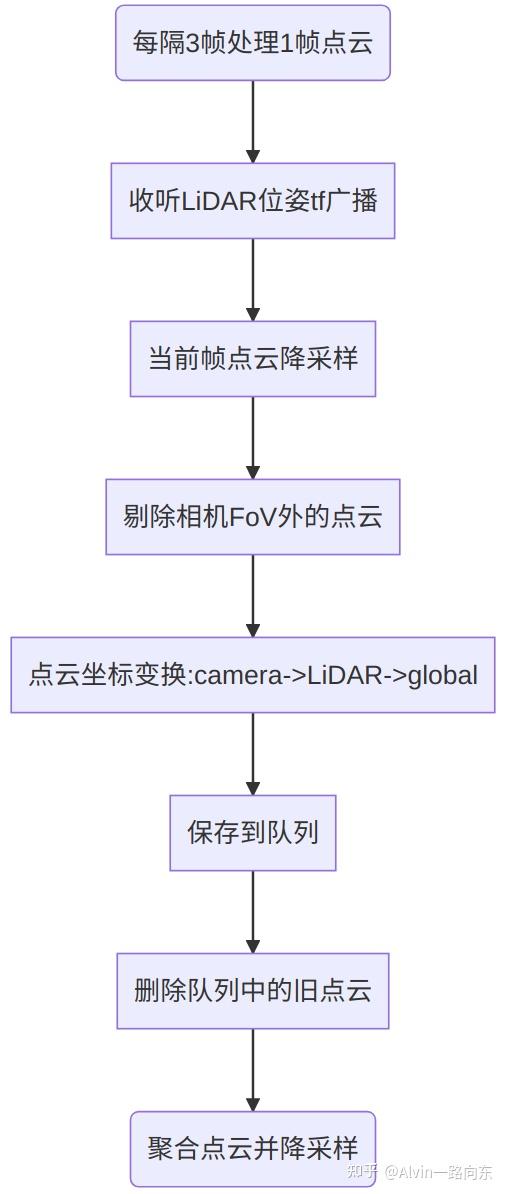
3.2 订阅点云的回调函数lidar_callback()

void lidar_callback(const sensor_msgs::PointCloud2ConstPtr& laser_msg)
static int lidar_count = -1;
//// 默认隔三帧取一帧
if (++lidar_count % (LIDAR_SKIP+1) != 0)
return;
// 0. listen to transform
//// 收听tf广播
static tf::TransformListener listener;
static tf::StampedTransform transform;
try{
listener.waitForTransform("vins_world", "vins_body_ros", laser_msg->header.stamp, ros::Duration(0.01));
listener.lookupTransform("vins_world", "vins_body_ros", laser_msg->header.stamp, transform);
catch (tf::TransformException ex){
// ROS_ERROR("lidar no tf");
return;
//// 获取位姿
double xCur, yCur, zCur, rollCur, pitchCur, yawCur;
xCur = transform.getOrigin().x();
yCur = transform.getOrigin().y();
zCur = transform.getOrigin().z();
tf::Matrix3x3 m(transform.getRotation());
m.getRPY(rollCur, pitchCur, yawCur);
Eigen::Affine3f transNow = pcl::getTransformation(xCur, yCur, zCur, rollCur, pitchCur, yawCur);
// 1. convert laser cloud message to pcl
//// 获取点云
pcl::PointCloud<PointType>::Ptr laser_cloud_in(new pcl::PointCloud<PointType>());
pcl::fromROSMsg(*laser_msg, *laser_cloud_in);
// 2. downsample new cloud (save memory)
//// 降采样
pcl::PointCloud<PointType>::Ptr laser_cloud_in_ds(new pcl::PointCloud<PointType>());
static pcl::VoxelGrid<PointType> downSizeFilter;
downSizeFilter.setLeafSize(0.2, 0.2, 0.2);
downSizeFilter.setInputCloud(laser_cloud_in);
downSizeFilter.filter(*laser_cloud_in_ds);
*laser_cloud_in = *laser_cloud_in_ds;
// 3. filter lidar points (only keep points in camera view)
//// 仅保留相机FoV中的点
pcl::PointCloud<PointType>::Ptr laser_cloud_in_filter(new pcl::PointCloud<PointType>());
for (int i = 0; i < (int)laser_cloud_in->size(); ++i)
PointType p = laser_cloud_in->points[i];
if (p.x >= 0 && abs(p.y / p.x) <= 10 && abs(p.z / p.x) <= 10)
laser_cloud_in_filter->push_back(p);
*laser_cloud_in = *laser_cloud_in_filter;
// TODO: transform to IMU body frame
// 4. offset T_lidar -> T_camera
//// 从lidar坐标系转换到camera坐标系
pcl::PointCloud<PointType>::Ptr laser_cloud_offset(new pcl::PointCloud<PointType>());
Eigen::Affine3f transOffset = pcl::getTransformation(L_C_TX, L_C_TY, L_C_TZ, L_C_RX, L_C_RY, L_C_RZ);
pcl::transformPointCloud(*laser_cloud_in, *laser_cloud_offset, transOffset);
*laser_cloud_in = *laser_cloud_offset;
// 5. transform new cloud into global odom frame
//// 从camera坐标系转换到global坐标系
pcl::PointCloud<PointType>::Ptr laser_cloud_global(new pcl::PointCloud<PointType>());
pcl::transformPointCloud(*laser_cloud_in, *laser_cloud_global, transNow);
// 6. save new cloud
//// 保存到队列
double timeScanCur = laser_msg->header.stamp.toSec();
cloudQueue.push_back(*laser_cloud_global);
timeQueue.push_back(timeScanCur);
// 7. pop old cloud
//// 删除与最新的点云时间戳相差5s以上的旧点云
while (!timeQueue.empty())
if (timeScanCur - timeQueue.front() > 5.0)
cloudQueue.pop_front();
timeQueue.pop_front();
} else {
break;
std::lock_guard<std::mutex> lock(mtx_lidar);
// 8. fuse global cloud
//// 聚合队列中的点云
depthCloud->clear();
for (int i = 0; i < (int)cloudQueue.size(); ++i)
*depthCloud += cloudQueue[i];
// 9. downsample global cloud
//// 聚合点云降采样
pcl::PointCloud<PointType>::Ptr depthCloudDS(new pcl::PointCloud<PointType>());
downSizeFilter.setLeafSize(0.2, 0.2, 0.2);
downSizeFilter.setInputCloud(depthCloud);
downSizeFilter.filter(*depthCloudDS);
*depthCloud = *depthCloudDS;
四、FeatureTracker类
4.1 FeatureTracker类成员概览
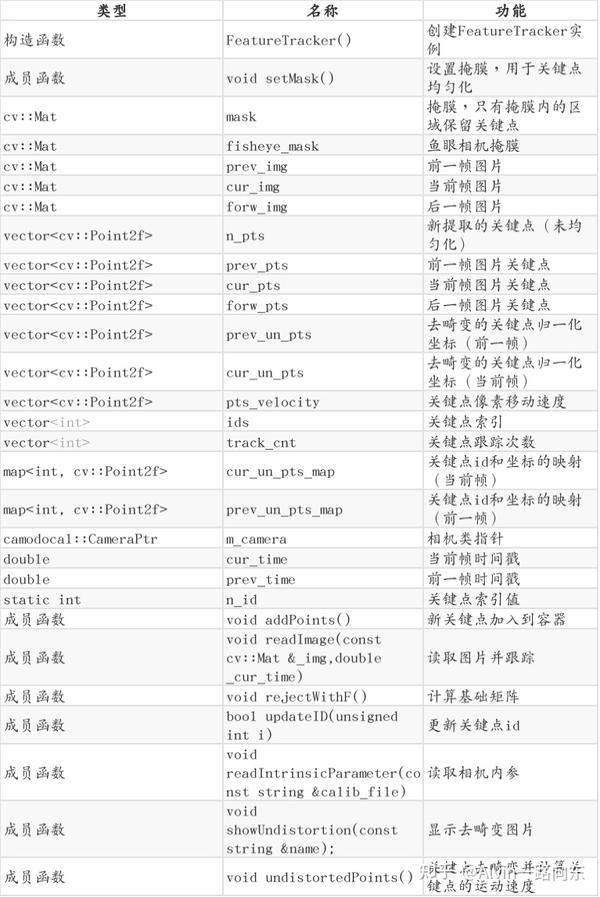

4.2 构造函数
空构造函数,仅用于初始化参数
4.3 关键点均匀化函数setMask()
void FeatureTracker::setMask()
//// 按照参数设置掩膜
if(FISHEYE)
mask = fisheye_mask.clone();
mask = cv::Mat(ROW, COL, CV_8UC1, cv::Scalar(255));
// prefer to keep features that are tracked for long time
//// 取出光流跟踪的关键点forw_pts,关键点索引ids,关键点跟踪次数track_cnt,按照跟踪次数由大到小保存到数组中
vector<pair<int, pair<cv::Point2f, int>>> cnt_pts_id;
for (unsigned int i = 0; i < forw_pts.size(); i++)
cnt_pts_id.push_back(make_pair(track_cnt[i], make_pair(forw_pts[i], ids[i])));
sort(cnt_pts_id.begin(), cnt_pts_id.end(), [](const pair<int, pair<cv::Point2f, int>> &a, const pair<int, pair<cv::Point2f, int>> &b)
return a.first > b.first;
forw_pts.clear();
ids.clear();
track_cnt.clear();
for (auto &it : cnt_pts_id)
//// 只保留指定掩模区域内的关键点
if (mask.at<uchar>(it.second.first) == 255)
forw_pts.push_back(it.second.first);
ids.push_back(it.second.second);
track_cnt.push_back(it.first);
//// 将已有特征点的区域灰度置零,以该点为中心,MIN_DIST为半径的实心圆;该区域就不再检测特征点了;
cv::circle(mask, it.second.first, MIN_DIST, 0, -1);
4.4 添加新关键点函数addPoints()
void FeatureTracker::addPoints()
for (auto &p : n_pts)
// 加入到后一帧关键点数组 id设为-1 跟踪次数设为1
forw_pts.push_back(p);
ids.push_back(-1);
track_cnt.push_back(1);
4.5 跟踪图片函数readImage()
void FeatureTracker::readImage(const cv::Mat &_img, double _cur_time)
cv::Mat img;
TicToc t_r;
cur_time = _cur_time;
//// 图片灰度均衡化处理
if (EQUALIZE)
cv::Ptr<cv::CLAHE> clahe = cv::createCLAHE(3.0, cv::Size(8, 8));
TicToc t_c;
clahe->apply(_img, img);
ROS_DEBUG("CLAHE costs: %fms", t_c.toc());
img = _img;
//// 如果后一帧图片为空,代表是第一帧图片,设置前一帧当前帧后一帧图片均为img
if (forw_img.empty())
prev_img = cur_img = forw_img = img;
//// 如果后一帧非空,设置后一帧图片为img
forw_img = img;
//// 清空后一帧关键点并跟踪后一帧图片
forw_pts.clear();
if (cur_pts.size() > 0)
TicToc t_o;
vector<uchar> status;
vector<float> err;
cv::calcOpticalFlowPyrLK(cur_img, forw_img, cur_pts, forw_pts, status, err, cv::Size(21, 21), 3);
for (int i = 0; i < int(forw_pts.size()); i++)
if (status[i] && !inBorder(forw_pts[i]))
status[i] = 0;
//// 根据跟踪状态向量去除没有跟踪到的特征点;
reduceVector(prev_pts, status);
reduceVector(cur_pts, status);
reduceVector(forw_pts, status);
reduceVector(ids, status);
reduceVector(cur_un_pts, status);
reduceVector(track_cnt, status);
ROS_DEBUG("temporal optical flow costs: %fms", t_o.toc());
//// 对于仍然存在与track_cnt中的关键点,跟踪次数+1
for (auto &n : track_cnt)
n++;
//// 如果当前帧是关键帧
if (PUB_THIS_FRAME)
//// 根据2D特征匹配关系计算基本矩阵(对极几何),并利用rasanc算法去除外点;
rejectWithF();
ROS_DEBUG("set mask begins");
TicToc t_m;
//// 关键点均匀化
setMask();
ROS_DEBUG("set mask costs %fms", t_m.toc());
ROS_DEBUG("detect feature begins");
TicToc t_t;
int n_max_cnt = MAX_CNT - static_cast<int>(forw_pts.size());
//// 如果跟踪到的点少于设定值,则在最新帧提取新的特征点,保证跟踪质量;否则不提取新的关键点
if (n_max_cnt > 0)
if(mask.empty())
cout << "mask is empty " << endl;
if (mask.type() != CV_8UC1)
cout << "mask type wrong " << endl;
if (mask.size() != forw_img.size())
cout << "wrong size " << endl;
//// 根据指定数量,指定的掩模区域提取新特征点,已有特征点的区域就不用再提取了,保证特征点均匀分布;
cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT - forw_pts.size(), 0.01, MIN_DIST, mask);
n_pts.clear();
ROS_DEBUG("detect feature costs: %fms", t_t.toc());
ROS_DEBUG("add feature begins");
TicToc t_a;
//// 将新提取的特征点加入到跟踪向量中;
addPoints();
ROS_DEBUG("selectFeature costs: %fms", t_a.toc());
//// 更新前一帧和当前帧的数据
prev_img = cur_img;
prev_pts = cur_pts;
prev_un_pts = cur_un_pts;
cur_img = forw_img;
cur_pts = forw_pts;
// 根据相机模型去除视觉特征畸变,并计算特征运动速度;
// 只对跟踪点去畸变,而不用对全部像素点去畸变
undistortedPoints();
prev_time = cur_time;
4.6 计算基础矩阵函数rejectWithF()
void FeatureTracker::rejectWithF()
if (forw_pts.size() >= 8)
ROS_DEBUG("FM ransac begins");
TicToc t_f;
vector<cv::Point2f> un_cur_pts(cur_pts.size()), un_forw_pts(forw_pts.size());
for (unsigned int i = 0; i < cur_pts.size(); i++)
Eigen::Vector3d tmp_p;
//// 获取当前帧和后一帧的关键点归一化坐标
m_camera->liftProjective(Eigen::Vector2d(cur_pts[i].x, cur_pts[i].y), tmp_p);
tmp_p.x() = FOCAL_LENGTH * tmp_p.x() / tmp_p.z() + COL / 2.0;
tmp_p.y() = FOCAL_LENGTH * tmp_p.y() / tmp_p.z() + ROW / 2.0;
un_cur_pts[i] = cv::Point2f(tmp_p.x(), tmp_p.y());
m_camera->liftProjective(Eigen::Vector2d(forw_pts[i].x, forw_pts[i].y), tmp_p);
tmp_p.x() = FOCAL_LENGTH * tmp_p.x() / tmp_p.z() + COL / 2.0;
tmp_p.y() = FOCAL_LENGTH * tmp_p.y() / tmp_p.z() + ROW / 2.0;
un_forw_pts[i] = cv::Point2f(tmp_p.x(), tmp_p.y());
vector<uchar> status;
//// 计算基础矩阵,采用FM_RANSAC排除外点
cv::findFundamentalMat(un_cur_pts, un_forw_pts, cv::FM_RANSAC, F_THRESHOLD, 0.99, status);
//// 删除外点
int size_a = cur_pts.size();
reduceVector(prev_pts, status);
reduceVector(cur_pts, status);
reduceVector(forw_pts, status);
reduceVector(cur_un_pts, status);
reduceVector(ids, status);
reduceVector(track_cnt, status);
ROS_DEBUG("FM ransac: %d -> %lu: %f", size_a, forw_pts.size(), 1.0 * forw_pts.size() / size_a);
ROS_DEBUG("FM ransac costs: %fms", t_f.toc());
4.7 更新关键点索引函数updateID()
bool FeatureTracker::updateID(unsigned int i)
if (i < ids.size())
//// 给没有索引的关键点添加索引
if (ids[i] == -1)
ids[i] = n_id++;
return true;
return false;
4.8 读取相机内参函数readIntrinsicParameter()
直接读取相机内参,略
4.9 去畸变可视化函数showUndistortion()
void FeatureTracker::showUndistortion(const string &name)
//// 创建去畸变图片,长宽留出600像素的裕度
cv::Mat undistortedImg(ROW + 600, COL + 600, CV_8UC1, cv::Scalar(0));
vector<Eigen::Vector2d> distortedp, undistortedp;
for (int i = 0; i < COL; i++)
for (int j = 0; j < ROW; j++)
//// 计算每个坐标的归一化平面坐标(这里应该已经包含了去畸变)
Eigen::Vector2d a(i, j);
Eigen::Vector3d b;
m_camera->liftProjective(a, b);
distortedp.push_back(a);
undistortedp.push_back(Eigen::Vector2d(b.x() / b.z(), b.y() / b.z()));
//printf("%f,%f->%f,%f,%f\n)\n", a.x(), a.y(), b.x(), b.y(), b.z());
for (int i = 0; i < int(undistortedp.size()); i++)
//// 重新把归一化平面上的点投影到像素坐标,于是就得到了畸变坐标与去畸变坐标的对应关系
cv::Mat pp(3, 1, CV_32FC1);
pp.at<float>(0, 0) = undistortedp[i].x() * FOCAL_LENGTH + COL / 2;
pp.at<float>(1, 0) = undistortedp[i].y() * FOCAL_LENGTH + ROW / 2;
pp.at<float>(2, 0) = 1.0;
//cout << trackerData[0].K << endl;
//printf("%lf %lf\n", p.at<float>(1, 0), p.at<float>(0, 0));
//printf("%lf %lf\n", pp.at<float>(1, 0), pp.at<float>(0, 0));
//// 按照对应关系得到去畸变图片并显示出来
if (pp.at<float>(1, 0) + 300 >= 0 && pp.at<float>(1, 0) + 300 < ROW + 600 && pp.at<float>(0, 0) + 300 >= 0 && pp.at<float>(0, 0) + 300 < COL + 600)
undistortedImg.at<uchar>(pp.at<float>(1, 0) + 300, pp.at<float>(0, 0) + 300) = cur_img.at<uchar>(distortedp[i].y(), distortedp[i].x());
//ROS_ERROR("(%f %f) -> (%f %f)", distortedp[i].y, distortedp[i].x, pp.at<float>(1, 0), pp.at<float>(0, 0));
cv::imshow(name, undistortedImg);
cv::waitKey(0);
4.10 关键点去畸变函数undistortedPoints()
void FeatureTracker::undistortedPoints()
cur_un_pts.clear();
cur_un_pts_map.clear();
//cv::undistortPoints(cur_pts, un_pts, K, cv::Mat());
//// 获取关键点的去畸变归一化平面坐标,更新cur_un_pts数组和cur_un_pts_map映射
for (unsigned int i = 0; i < cur_pts.size(); i++)
Eigen::Vector2d a(cur_pts[i].x, cur_pts[i].y);
Eigen::Vector3d b;
m_camera->liftProjective(a, b);
cur_un_pts.push_back(cv::Point2f(b.x() / b.z(), b.y() / b.z()));
cur_un_pts_map.insert(make_pair(ids[i], cv::Point2f(b.x() / b.z(), b.y() / b.z())));
//printf("cur pts id %d %f %f", ids[i], cur_un_pts[i].x, cur_un_pts[i].y);
// caculate points velocity
//// 去畸变之后。计算特征点像素运动速度,
if (!prev_un_pts_map.empty())
double dt = cur_time - prev_time;
pts_velocity.clear();
for (unsigned int i = 0; i < cur_un_pts.size(); i++)
//// 在前一帧的关键点映射中能找到的有速度,找不到的设置速度为0(没有跟踪到的关键点和新发现的关键点)
if (ids[i] != -1)
std::map<int, cv::Point2f>::iterator it;
it = prev_un_pts_map.find(ids[i]);
if (it != prev_un_pts_map.end())
double v_x = (cur_un_pts[i].x - it->second.x) / dt;
double v_y = (cur_un_pts[i].y - it->second.y) / dt;
pts_velocity.push_back(cv::Point2f(v_x, v_y));
pts_velocity.push_back(cv::Point2f(0, 0));
pts_velocity.push_back(cv::Point2f(0, 0));
//// 前一帧关键点映射为空,则所有关键点速度均为0
for (unsigned int i = 0; i < cur_pts.size(); i++)
pts_velocity.push_back(cv::Point2f(0, 0));
prev_un_pts_map = cur_un_pts_map;
五、DepthRegister类
5.1 DepthRegister类成员概览
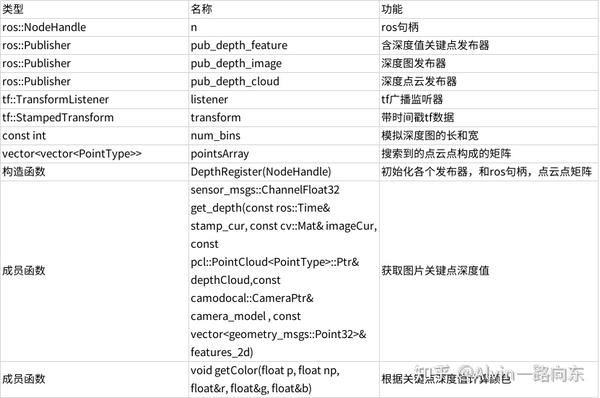

5.2 搜索深度值函数get_depth()
sensor_msgs::ChannelFloat32 get_depth(const ros::Time& stamp_cur, const cv::Mat& imageCur,
const pcl::PointCloud<PointType>::Ptr& depthCloud,
const camodocal::CameraPtr& camera_model ,
const vector<geometry_msgs::Point32>& features_2d)
// 0.1 initialize depth for return
//// 初始化深度值通道
sensor_msgs::ChannelFloat32 depth_of_point;
depth_of_point.name = "depth";
depth_of_point.values.resize(features_2d.size(), -1);
// 0.2 check if depthCloud available
if (depthCloud->size() == 0)
return depth_of_point;
// 0.3 look up transform at current image time
//// 收听tf广播
try{
listener.waitForTransform("vins_world", "vins_body_ros", stamp_cur, ros::Duration(0.01));
listener.lookupTransform("vins_world", "vins_body_ros", stamp_cur, transform);
catch (tf::TransformException ex){
// ROS_ERROR("image no tf");
return depth_of_point;
//// tf位姿格式转换到仿射变换
double xCur, yCur, zCur, rollCur, pitchCur, yawCur;
xCur = transform.getOrigin().x();
yCur = transform.getOrigin().y();
zCur = transform.getOrigin().z();
tf::Matrix3x3 m(transform.getRotation());
m.getRPY(rollCur, pitchCur, yawCur);
Eigen::Affine3f transNow = pcl::getTransformation(xCur, yCur, zCur, rollCur, pitchCur, yawCur);
// 0.4 transform cloud from global frame to camera frame
//// 世界坐标系点云转换到相机坐标系点云
pcl::PointCloud<PointType>::Ptr depth_cloud_local(new pcl::PointCloud<PointType>());
pcl::transformPointCloud(*depthCloud, *depth_cloud_local, transNow.inverse());
// 0.5 project undistorted normalized (z) 2d features onto a unit sphere
//// 把2d关键点投影到球坐标系,并做坐标变换
pcl::PointCloud<PointType>::Ptr features_3d_sphere(new pcl::PointCloud<PointType>());
for (int i = 0; i < (int)features_2d.size(); ++i)
// normalize 2d feature to a unit sphere
Eigen::Vector3f feature_cur(features_2d[i].x, features_2d[i].y, features_2d[i].z); // z always equal to 1
feature_cur.normalize();
// convert to ROS standard
//// LiDAR是Front-Left-Up坐标系,Camera是Right-Down-Front坐标系
PointType p;
p.x = feature_cur(2);
p.y = -feature_cur(0);
p.z = -feature_cur(1);
p.intensity = -1; // intensity will be used to save depth
features_3d_sphere->push_back(p);
// 3. project depth cloud on a range image, filter points satcked in the same region
//// 筛选在相机FoV以内的,距离相机近的点云点,用来构建用于搜索关键点深度的点云
//// 点云投影图分辨率
float bin_res = 180.0 / (float)num_bins; // currently only cover the space in front of lidar (-90 ~ 90)
cv::Mat rangeImage = cv::Mat(num_bins, num_bins, CV_32F, cv::Scalar::all(FLT_MAX)); //// 点云投影图
for (int i = 0; i < (int)depth_cloud_local->size(); ++i)
PointType p = depth_cloud_local->points[i];
// filter points not in camera view
//// 排除相机FoV以外的点
if (p.x < 0 || abs(p.y / p.x) > 10 || abs(p.z / p.x) > 10)
continue;
// find row id in range image
//// 计算俯仰角,横排id
float row_angle = atan2(p.z, sqrt(p.x * p.x + p.y * p.y)) * 180.0 / M_PI + 90.0; // degrees, bottom -> up, 0 -> 360
int row_id = round(row_angle / bin_res);
// find column id in range image
//// 计算偏航角,竖排id
float col_angle = atan2(p.x, p.y) * 180.0 / M_PI; // degrees, left -> right, 0 -> 360
int col_id = round(col_angle / bin_res);
// id may be out of boundary
//// 排除过界id
if (row_id < 0 || row_id >= num_bins || col_id < 0 || col_id >= num_bins)
continue;
// only keep points that's closer
//// 计算点云点与相机的距离,如果同时有两个点在同一个像素坐标上,则保留较小的那个
float dist = pointDistance(p);
if (dist < rangeImage.at<float>(row_id, col_id))
rangeImage.at<float>(row_id, col_id) = dist;
pointsArray[row_id][col_id] = p;
// 4. extract downsampled depth cloud from range image
//// 构建用于搜索关键点深度的点云并发布
pcl::PointCloud<PointType>::Ptr depth_cloud_local_filter2(new pcl::PointCloud<PointType>());
for (int i = 0; i < num_bins; ++i)
for (int j = 0; j < num_bins; ++j)
if (rangeImage.at<float>(i, j) != FLT_MAX)
depth_cloud_local_filter2->push_back(pointsArray[i][j]);
*depth_cloud_local = *depth_cloud_local_filter2;
publishCloud(&pub_depth_cloud, depth_cloud_local, stamp_cur, "vins_body_ros");
// 5. project depth cloud onto a unit sphere
//// 把上面的点云投影到单位球球面,intensity保存距离信息
pcl::PointCloud<PointType>::Ptr depth_cloud_unit_sphere(new pcl::PointCloud<PointType>());
for (int i = 0; i < (int)depth_cloud_local->size(); ++i)
PointType p = depth_cloud_local->points[i];
float range = pointDistance(p);
p.x /= range;
p.y /= range;
p.z /= range;
p.intensity = range;
depth_cloud_unit_sphere->push_back(p);
//// 如果球面上的点云点太少则直接返回
if (depth_cloud_unit_sphere->size() < 10)
return depth_of_point;
// 6. create a kd-tree using the spherical depth cloud
//// 建立kdtree
pcl::KdTreeFLANN<PointType>::Ptr kdtree(new pcl::KdTreeFLANN<PointType>());
kdtree->setInputCloud(depth_cloud_unit_sphere);
// 7. find the feature depth using kd-tree
//// kdtree搜索与关键点球面最近的三个点
vector<int> pointSearchInd;
vector<float> pointSearchSqDis;
float dist_sq_threshold = pow(sin(bin_res / 180.0 * M_PI) * 5.0, 2); //// 搜索距离阈值
for (int i = 0; i < (int)features_3d_sphere->size(); ++i)
kdtree->nearestKSearch(features_3d_sphere->points[i], 3, pointSearchInd, pointSearchSqDis);
//// 保证有三个点并且最远距离仍不超过阈值
if (pointSearchInd.size() == 3 && pointSearchSqDis[2] < dist_sq_threshold)
float r1 = depth_cloud_unit_sphere->points[pointSearchInd[0]].intensity;
Eigen::Vector3f A(depth_cloud_unit_sphere->points[pointSearchInd[0]].x * r1,
depth_cloud_unit_sphere->points[pointSearchInd[0]].y * r1,
depth_cloud_unit_sphere->points[pointSearchInd[0]].z * r1);
float r2 = depth_cloud_unit_sphere->points[pointSearchInd[1]].intensity;
Eigen::Vector3f B(depth_cloud_unit_sphere->points[pointSearchInd[1]].x * r2,
depth_cloud_unit_sphere->points[pointSearchInd[1]].y * r2,
depth_cloud_unit_sphere->points[pointSearchInd[1]].z * r2);
float r3 = depth_cloud_unit_sphere->points[pointSearchInd[2]].intensity;
Eigen::Vector3f C(depth_cloud_unit_sphere->points[pointSearchInd[2]].x * r3,
depth_cloud_unit_sphere->points[pointSearchInd[2]].y * r3,
depth_cloud_unit_sphere->points[pointSearchInd[2]].z * r3);
// https://math.stackexchange.com/questions/100439/determine-where-a-vector-will-intersect-a-plane
Eigen::Vector3f V(features_3d_sphere->points[i].x,
features_3d_sphere->points[i].y,
features_3d_sphere->points[i].z);
//// 计算关键点与ABC平面之间的距离
Eigen::Vector3f N = (A - B).cross(B - C);
float s = (N(0) * A(0) + N(1) * A(1) + N(2) * A(2))
/ (N(0) * V(0) + N(1) * V(1) + N(2) * V(2));
float min_depth = min(r1, min(r2, r3));
float max_depth = max(r1, max(r2, r3));
//// 三个点之间的距离也不能太远,距离s应该在ABC距离之间
if (max_depth - min_depth > 2 || s <= 0.5)
continue;
} else if (s - max_depth > 0) {
s = max_depth;
} else if (s - min_depth < 0) {
s = min_depth;
// convert feature into cartesian space if depth is available
//// 关键点乘以距离,其中x坐标应当就等于深度值
features_3d_sphere->points[i].x *= s;
features_3d_sphere->points[i].y *= s;
features_3d_sphere->points[i].z *= s;
// the obtained depth here is for unit sphere, VINS estimator needs depth for normalized feature (by value z), (lidar x = camera z)
features_3d_sphere->points[i].intensity = features_3d_sphere->points[i].x;
// visualize features in cartesian 3d space (including the feature without depth (default 1))
//// 发布包含深度的关键点点云
publishCloud(&pub_depth_feature, features_3d_sphere, stamp_cur, "vins_body_ros");
// update depth value for return
//// 保存大于3的深度值,返回到通道
for (int i = 0; i < (int)features_3d_sphere->size(); ++i)
if (features_3d_sphere->points[i].intensity > 3.0)
depth_of_point.values[i] = features_3d_sphere->points[i].intensity;
// visualization project points on image for visualization (it's slow!)
//// 可视化
if (pub_depth_image.getNumSubscribers() != 0)
vector<cv::Point2f> points_2d;
vector<float> points_distance;
for (int i = 0; i < (int)depth_cloud_local->size(); ++i)
// convert points from 3D to 2D
Eigen::Vector3d p_3d(-depth_cloud_local->points[i].y,
-depth_cloud_local->points[i].z,
depth_cloud_local->points[i].x);
Eigen::Vector2d p_2d;
camera_model->spaceToPlane(p_3d, p_2d);
points_2d.push_back(cv::Point2f(p_2d(0), p_2d(1)));
points_distance.push_back(pointDistance(depth_cloud_local->points[i]));
cv::Mat showImage, circleImage;
cv::cvtColor(imageCur, showImage, cv::COLOR_GRAY2RGB);
circleImage = showImage.clone();
for (int i = 0; i < (int)points_2d.size(); ++i)
float r, g, b;
getColor(points_distance[i], 50.0, r, g, b);
cv::circle(circleImage, points_2d[i], 0, cv::Scalar(r, g, b), 5);
cv::addWeighted(showImage, 1.0, circleImage, 0.7, 0, showImage); // blend camera image and circle image
cv_bridge::CvImage bridge;
bridge.image = showImage;
bridge.encoding = "rgb8";
sensor_msgs::Image::Ptr imageShowPointer = bridge.toImageMsg();
imageShowPointer->header.stamp = stamp_cur;