


LQG输出调节控制Matlab仿真实例

LQG控制(linear–quadratic–Gaussian control)的全名是线性二次高斯控制,是 控制理论 中的基础 最优控制 问题之一。LQG控制可以应用在 线性时不变系统 及线性 时变系统 ,产生容易计算以及实现的线性动态回授控制器。
本文目录
- 什么是LQG Regulator
- LQR(Linear Quadratic Regulator)
- 卡尔曼滤波器
- LQG
- 分离性原理
- LQG仿真实例
- lqg函数
- 输出调节问题
- lqr函数
- 实例
- 运行结果
- LQG的缺点
什么是LQG Regulator
LQG Regulator的全称是Linear-Quadratic-Gaussian Regulator,简单的讲,它是通过组合一个最优二次型线性调节器LQR和一个最优状态估计器(卡尔曼滤波器)得到的控制器,因此,为了理解LQG,首先需要理解LQR和卡尔曼滤波器,本文只涉及连续时间的情况。
LQR(Linear Quadratic Regulator)
介绍LQR的内容已经有非常多了,我就不画蛇添足了,介绍几个我觉得很好的教程,内容都很短,一会儿就能看完,不过这些依旧 只是侧重于感性认知 ,真的想深入理论证明的话还是要看书。
B站上一位非常优秀的讲控制理论的UP主,他的每一个视频都强烈推荐,尤其是控制理论初学者,可以避免很多弯路。
这两个是同一个视频的油管和B站版本,是很有名的Control Bootcamp系列,面向控制纯初学者。
这是一篇相对比较深入的知乎文章,作者很厉害。
卡尔曼滤波器
同样的,卡尔曼滤波器的教材也很多,同时卡尔曼滤波器也被用在多个领域,在LQG框架中的卡尔曼滤波器,指的是一个最优状态观测器(An optimal observer),这里的观测器就是现代控制理论-状态空间分析中的最常见的观测器,也叫龙伯格观测器(luenberger observer),只不过后者的极点是自由配置的,并且设计后者时并没有考虑噪声的因素,因此不能算是最优。
对于系统
\begin{array}{ll}\dot{x}=A x+B u+G w & \text { (state equation) } \\ y=C x+D u+H w+v & \text { (measurement equation) }\end{array}
其中 w 是过程噪声(process noise), v 是观测噪声(measurement noise),它们被假设是符合高斯(Gaussian)分布的,这也是LQG中的G的来源。G、H是常系数矩阵,用于描述 x 中的各部分受到的噪声强度不一致的情况。很多教材中, H 被认为是零矩阵,区别不大。
假设
- 系统可观测
-
噪声
w
和
v
符合高斯分布,且协方差矩阵可知:
E\left(w w^{T}\right)=Q_k, \quad E\left(v v^{T}\right)=R_k, \quad E\left(w v^{T}\right)=N_k
对于给定的观测器动态和代价函数
\begin{equation}\begin{array}{l} \dot{\hat{x}}=A \hat{x}+B u+L(y-C \hat{x}-D u) \end{array}\\ \hat{y}=\hat{x} \end{equation}
\\ J'=\lim _{t \rightarrow \infty} E\left(\{x-\hat{x}\}\{x-\hat{x}\}^{T}\right)
代价函数可以理解为观测误差的累积,之所以是 \heartsuit \heartsuit^T 的形式,是为了不想让正负相反的误差相抵消。
我们旨在找到一个常系数矩阵 L ,使得 J’ 最小。最后的结果是:
L=\left(P C^{T}+\bar{N}\right) \bar{R}^{-1}
其中
\begin{array}{l} \bar{R}=R_k+H N_k+N_k^{T} H^{T}+H Q_k H^{T} \\ \bar{N}=G\left(Q_k H^{T}+N_k\right) \end{array}
同时 P 是以下Riccati方程的解
A^{T} P+P A-(P B+N_k) R_k^{-1}\left(B^{T} P+N_k^{T}\right)+Q_k=0
使用得到的这个 L 的最优观测器,就是LQG框架使用的卡尔曼滤波器。
LQG
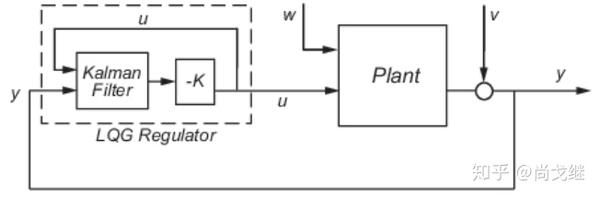
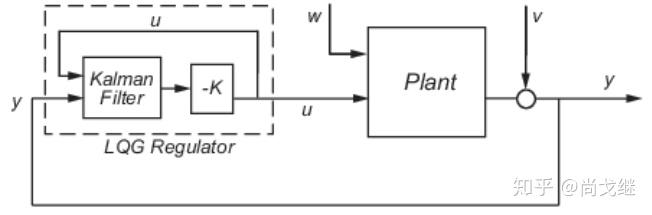
控制框架如图,其中的 -K 就是LQ Regulator。
w 是过程噪声(process noise), v 是观测噪声(measurement noise)
分离性原理
假设系统可控、可观测。
LQR是一种最优的线性状态反馈,Kalman filter是一种最优的状态估计,直接将两者级联,闭环的系统可以写成
\left\{\begin{aligned} \left(\begin{array}{c} \dot{x} \\ \dot{\hat{x}} \end{array}\right) &=A_{l q g}\left(\begin{array}{l} x \\ \hat{x} \end{array}\right)+B_{l q g}\left(\begin{array}{c} w(t) \\ v(t) \end{array}\right) \\ y(t) &=C_{l q g}\left(\begin{array}{l} x \\ \hat{x} \end{array}\right)+D_{l q g}\left(\begin{array}{c} w(t) \\ v(t) \end{array}\right) \end{aligned}\right.
其中
A_{lqg}=\left[\begin{array}{cc} A & -BF \\ LC & A-BF-LC \end{array}\right] \quad B_{lqg}=\left[\begin{array}{cc} G & 0 \\ LH & L \end{array} \right] \\ C_{lqg}=\left[\begin{array}{cc} C & -DF \\ 0 & 0 \end{array}\right] \quad D_{lqg}=\left[\begin{array}{cc} H & 0 \\ 0 & I \end{array}\right]
注意到坐标可以这样变换:
\left( \begin{array}{c} {x} \\ e \end{array} \right)=\left( \begin{array}{c} {x} \\ x-\hat{x} \end{array} \right) = \left[\begin{array}{c} I&0 \\ I&-I \end{array}\right]\left( \begin{array}{c} {x} \\ \hat{x} \end{array} \right) \\ \left[\begin{array}{c} I&0 \\ I&-I \end{array}\right]\left( \begin{array}{c} {x} \\ e \end{array} \right)=\left( \begin{array}{c} {x} \\ \hat{x} \end{array} \right)
其中 e=x-\hat{x} 代表观测器的误差。
应用坐标变换,得到整个闭环系统的状态方程
\left( \begin{array}{c} \dot{x} \\ \dot{e} \end{array} \right)= \left[\begin{array}{c} I&0 \\ I&-I \end{array}\right] A_{lqg} \left[\begin{array}{c} I&0 \\ I&-I \end{array}\right]\left( \begin{array}{c} {x} \\ e \end{array} \right)+\left[\begin{array}{c} I&0 \\ I&-I \end{array}\right]B_{lqg}\left[\begin{array}{c} w(t) \\ v(t) \end{array}\right]
即
\left( \begin{array}{c} \dot{x} \\ \dot{e} \end{array} \right)= \left[\begin{array}{cc} A-BF & BF \\ 0 & A-LC \end{array}\right]\left[ \begin{array}{c} {x} \\ {e} \end{array}\right] +\left[\begin{array}{c} I&0 \\ I&-I \end{array}\right]B_{lqg}\left[\begin{array}{c} w(t) \\ v(t) \end{array}\right]
可见,此处的状态矩阵是上三角分块的,并且 A-BF 和 A-LC 都是稳定的,即它们的特征值都严格小于零,根据分块矩阵的特征值得计算规则,这个大的矩阵也是稳定的,这意味着, 我们可以将LQR和Kalman filter级联,得到一个稳定的系统。这被叫做分离性原理。
LQG仿真实例
lqg函数
实现方式很多种,可以直接调用 lqg命令 ,得到一个直接可用的控制器:
但是,lqg的性能参数默认是这种形式的
J=\frac{1}{2} \int_{t_{0}}^{\infty}\left[x(t)^{T} Q x(t)+u(t)^{T} R u(t)\right] d t
可见控制目标是”令系统状态 x 和控制量 u 尽可能地小“,可是有些时候,控制目标是令系统的输出 y=Cx 尽可能地小,这种时候,问题被称作输出调节。lqg命令没办法解决输出调节,需要使用lqr命令,得到输出调节问题的最优线性反馈增益 K ,在此之上,再设计一个卡尔曼滤波器,将两者组合起来,就可以实现LQG的输出调节。
输出调节问题
对于系统
\left\{\begin{array}{l} \dot{x}(t)=A x(t)+B u(t) \\ y(t)=C x(t)+D u(t) \end{array}\right.
输出调节的问题,性能参数长这样
J=\int_{0}^{\infty} y^{T}(t) Q_{y} y(t)+u^{T}(t) R u(t)
将性能参数表达式展开
\begin{align} J&=\int_{0}^{\infty}[C x(t)+D u(t)]^TQ_y[C x(t)+D u(t)]+u^{T}(t) R_{} u(t) \\ &=\int_{0}^{\infty}x^{T}(t){[C^TQ_yC]}x(t)+2x^T(t){[D^TQ_yC]}u(t)+u^T(t){[D^TQ_yD+R]}u(t) \\ &=\int_{0}^{\infty} x^{T}(t){ Q_{x} }x(t)+2 x^{T}(t) {N }u(t)+u^{T}(t){ R_{u} }u(t) \end{align}
这是一个由 x 和 u ,而不是 y 和 u 组成的二次型表达式,这样做的目的,是为了和matlab的lqr函数接口对应
lqr函数
Matlab中 lqr 函数优化的最优性能指标是
J(u)=\int_{0}^{\infty}\left(x^{T} Q x+u^{T} R u+2 x^{T} N u\right) d t
调用格式是
[K,S,e] = lqr(SYS,Q,R,N)因此,想要解决输出调节问题,只需要先设计输出 y 和控制输入 u 的权重矩阵 Q_y,R ,再根据 Q_x=C^TQ_yC,N=D^TQ_yC,R_u=D^TQ_yD+R ,算出新的权重矩阵,调用函数就可以得到对应的最优线性状态反馈率 K
计算卡尔曼滤波器函数Kalman的调用格式类似,输入对应的噪声协方差矩阵即可。
实例
研究如下的车的悬吊系统
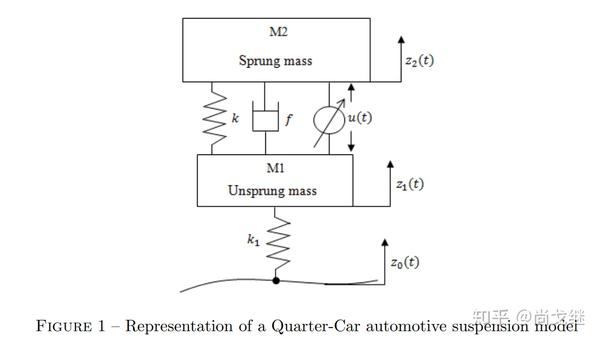
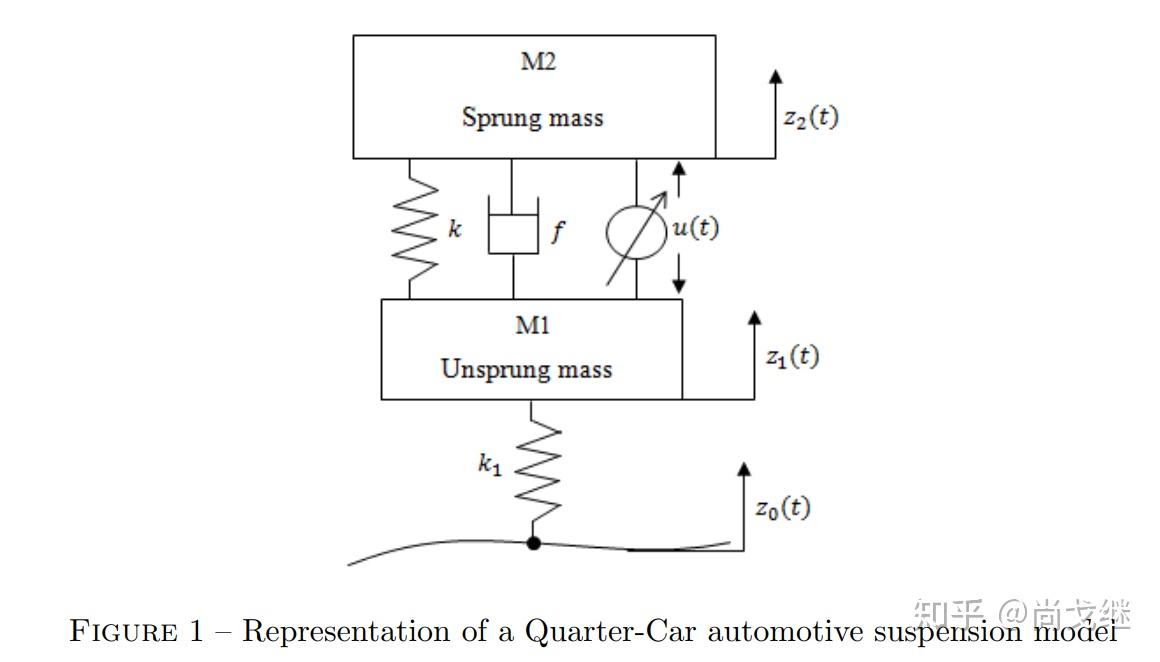
z_0 代表的是路上的颠簸
状态方程
\left(\begin{array}{c} \dot{x}_{1}(t) \\ \dot{x}_{2}(t) \\ \dot{x}_{3}(t) \\ \dot{x}_{4}(t) \end{array}\right)=\left(\begin{array}{cccc} 0 & 1 & 0 & 0 \\ -\frac{\left(k_{1}+k\right)}{M_{1}} & -\frac{f}{M_{1}} & \frac{k}{M_{1}} & \frac{f}{M_{1}} \\ 0 & 0 & 0 & 1 \\ \frac{k}{M_{2}} & \frac{f}{M_{2}} & -\frac{k}{M_{2}} & -\frac{f}{M_{2}} \end{array}\right)\left(\begin{array}{c} x_{1}(t) \\ x_{2}(t) \\ x_{3}(t) \\ x_{4}(t) \end{array}\right)+\underbrace{\left(\begin{array}{c} 0 \\ -\frac{1}{M_{1}} \\ 0 \\ \frac{1}{M_{2}} \end{array}\right)}_{B_{u}} u(t)+\left(\begin{array}{c} 0 \\ \frac{k_{1}}{M_{1}} \\ 0 \\ 0 \end{array}\right) z_{0}(t), \quad(1)
\begin{aligned} &\text { with } x_{1}(t)=z_{1}(t), x_{2}(t)=\frac{d z_{1}(t)}{d t}, x_{3}(t)=z_{2}(t) \text { and } x_{4}=\frac{d z_{2}(t)}{d t} . \text { The values of the parame- }\\ &\text { ters are } M_{1}=30 \mathrm{Kg}, M_{2}=250 \mathrm{Kg}, k=2.10^{4} \mathrm{~N} / \mathrm{m}, k_{1}=2.10^{5} \mathrm{~N} / \mathrm{m} \text { and } f=10^{3} \mathrm{~N} . \mathrm{S} / \mathrm{m} \end{aligned}
定义系统输出为 z_2(t)-z_1(t) , 这描述了整个车在路不平坦的时候的”颠簸程度“。
因此,对应的 C=[-1\ 0\ 1\ 0], D=0
系统是单输入单输出(SISO)的。控制量是减震器的力,输出则是车身中心到轮胎的距离,但是为了能够自由定义 z_0 ,将系统的 B 矩阵扩展成高维度形式,即系统有两个输入的通道,一个通道对应系统的真实输入,另一个通道对应系统受到的扰动。
代价函数
J=\int_{0}^{\infty} y^{T}(t) Q_{y} y(t)+u^{T}(t) R u(t)
使用的权重系数


clear all
close all
% constant
M1 = 30;
M2 = 250;
k = 2*10^4;
k1 = 2*10^5;
f = 10^3;
% system model
A = [0 1 0 0;
-(k1+k)/M1 -f/M1 k/M1 f/M1;
0 0 0 1;
k/M2 f/M2 -k/M2 -f/M2];
Bu = [0; -1/M1 ; 0; 1/M2]; % control
Bz = [0; k1/M1; 0; 0]; % disturbance
B = [Bu, Bz];
C = [-1 0 1 0]; % z2-z1
D = zeros(1,2);
C_full = eye(4);
D_full = zeros(4,2);
sys = ss(A,B,C,D);
% initial states
x0 = [0.0022; -0.1146; 0.0421; -0.0183];
% Properties Check
rank(ctrb(A,Bu))
rank(obsv(A,C))
% 根据不同的权重,计算LQR参数
Rlist= [1, 1e-4, 1e-8,1e-9] ;
for i = 1:1:4
%LQR参数计算
Qy = 1;
R = Rlist(i)
Q = C.'*Qy*C;
R = R + 0; % since D = 0
N = 0; % same reason
[K,S,e] = lqr(A,Bu,Q,R,N);
%simulink仿真,得到数据
sim('LQG.slx')
subplot(2,1,1)
plot(t,CL_u,'LineWidth',2,'DisplayName',['R: ',num2str(R)])
hold on
subplot(2,1,2)
plot(t,CL_y,'LineWidth',2,'DisplayName',['R: ',num2str(R)])
hold on
%显示图例
subplot(2,1,1)