


导航系统设计专题(三)—卡尔曼滤波算法入门

前言
扩展卡尔曼滤波(EKF) 是多旋翼飞行器导航系统设计中,最常用的最优估计算法之一。其原理是在卡尔曼滤波的基础上,对非线性模型进行线性化,再进行最优估计,因此,其核心算法原理与卡尔曼滤波算法相似。本篇将围绕卡尔曼滤波展开 ,阐述其核心五大公式,同时,以一个简单的线性问题的MATLAB仿真实例,展示如何搭建一个完整的卡尔曼滤波器。
卡尔曼滤波算法实现
卡尔曼滤波算法的公式推导有很多,本篇不作赘述,如果希望了解其算法原理,推荐阅读 秦永元的《卡尔曼滤波与组合导原理》 。下面直接放出卡尔曼滤波算法的五大核心公式:
- 状态更新方程
\hat x_{k}=F_{k}\hat x_{k-1}+B_{k}u_{k}\\ P_{k}=F_{k}P_{k-1}F_{k}^{T}+Q_{k}\\
- 量测更新方程
\hat x_{k}^{'}=\hat x_{k}+K(z_{k} - H_{k}\hat x_{k})\\ P_{k}^{'}=P_{k}-KH_{k}P_{k}\\ K=P_{k}H_{k}^{T}(H_{k}P_{k}H_{k}^{T}+R_{k})^{-1}\\
F_{k} 称为状态转移矩阵,其描述了系统的状态方程模型。
u_{k} 为模型的修正向量,用于对建立模型的修正,该项在卡尔曼滤波算法中不是必备的。
Q_{k} 为过程噪声,描述了建立系统的模型准确度。
P_{k} 为协方差矩阵,描述了各状态量之间的相关性。
P_{k}^{'} 为经过修正的协方差矩阵。
\hat x_{k}^{'} 为经过量测方程修正的状态量估计值。
K 为卡尔曼增益,描述的是量测量对于状态量的修正权重。
z_{k} 为观测量,多为传感器测量值或其等价值。
H_{k} 为量测矩阵,描述量测值与状态值之间的关系。
R_{k} 为量测噪声阵,描述传感器的测量噪声。
完整的卡尔曼滤波算法流程如下图所示,
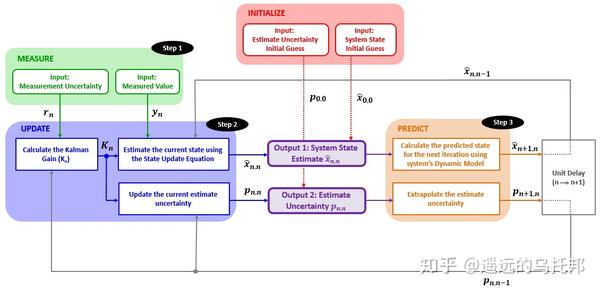

该流程图较清晰地阐述了整个卡尔曼滤波算法的流程:
- 确定系统的状态转移矩阵 F_{k} 与量测矩阵 H_{k} 。
- 确定协方差矩阵初值 P_{0} 与状态量初值 x_{0} .
- 更新卡尔曼增益 K 。
- 根据量测向量 z_{k} 、 卡尔曼增益 K 以及量测量 z_{k} ,修正状态量,得到该更新周期的状态估计值 \hat x_{k}^{'} 。
- 更新协方差矩阵,得到 P_{k}^{'} 。
- 根据状态转移矩阵,递推状态方程,预测下一周期状态量 \hat x_{k} 。
- 根据状态转移矩阵,递推协方差矩阵,预测下一周期协方差阵 P_{k} 。
匀速直线运动的MATLAB卡尔曼滤波估计实例
卡尔曼滤波算法的核心在于 状态更新 与 量测更新 两个部分,这里以匀速直线运动为例,建立运动方程,进而搭建对应的卡尔曼滤波器。
本案例中,假设物体以2.5 m/s 的速度,匀速运动,初速度为0,初始位置为6 m 处。
由此,可以建立对应的运动方程:
p(t)=2.5v(t)+6\\
对于该线性系统,我们观测的状态量为:
x_{k}= \begin{bmatrix} p_{k}\\ v_{k} \end{bmatrix}\\
根据运动学方程,易得:
\begin{bmatrix} p_{k}\\ v_{k} \end{bmatrix} = \begin{bmatrix} 1&\Delta t\\ 0&1 \end{bmatrix} \begin{bmatrix} p_{k-1}\\ v_{k-1} \end{bmatrix}\\
因此,状态转移矩阵 F_{k}=\begin{bmatrix} 1&\Delta t\\ 0&1 \end{bmatrix}\\
本案例中, \Delta t 取为 1 秒。
再来看量测方程:
z_{k}=H_{k}x_{k}+V_{k}\\
本案例中,唯一的观测量为位置 \vec p_{k} 易得:
\begin{bmatrix} \vec p_{k}\\ \vec v_{k} \end{bmatrix} = \begin{bmatrix} 1 &0 \end{bmatrix} \begin{bmatrix} p_{k}\\ v_{k} \end{bmatrix}\\
由此可得,量测矩阵 H_{k} :
H_{k}=\begin{bmatrix} 1 &0 \end{bmatrix}\\
一般而言,协方差阵的初值取一个较大值,本案例取值如下:
P_{0}=\begin{bmatrix} 100&0\\ 0&100 \end{bmatrix}\\
状态量初值如下:
x_{0}=\begin{bmatrix} 6\\ 0 \end{bmatrix}\\
本案例中,我们认为模型准确度非常高,因此, Q_{k} 取值为0,量测噪声 R 取25。
下面,我们将通过MATLAB的Simulink搭建系统模型,生成匀速直线运动的一组观测数据。
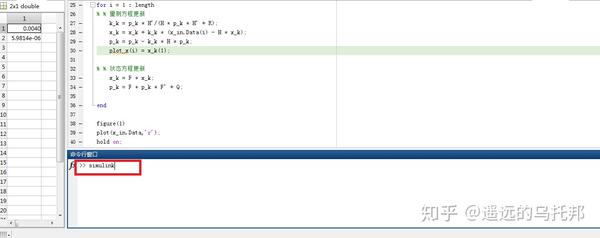
打开MATLAB后,在命令窗中输入"simulink",打开仿真模块,如下图所示。

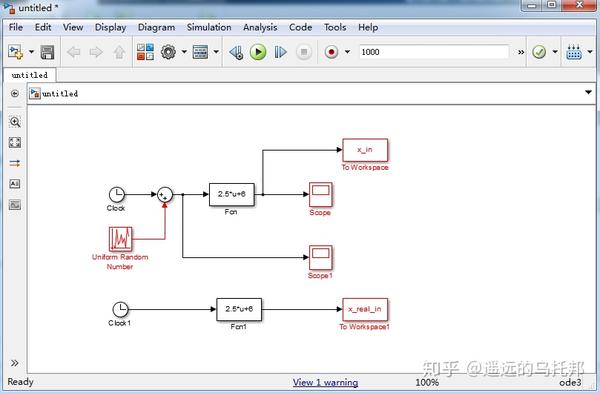
然后,我们按照上述的匀速直线运动模型,搭建对应的仿真模块,并叠加幅值为5 m 的随机噪声。这里,我们分别将叠加随机噪声的量测输出x_in 与 x_real_in加载到工作空间,如图所示。

在得到仿真量测数据后,我们就可以开始验证卡尔曼滤波算法的效果了。
下面为MATLAB仿真代码:
close all;
F = [1 1
0 1];
H = [1 0
0 1];
x0 = [6 0]';
p0 = [100 0
0 100];
Q = [0 0
0 0];
R = [25 0
0 1];
length = size(x_in.Time);
length = length(1,1);
x_k = [];
p_k = [];
k_k = [];
plot_x = [];
x_k = x0;
p_k = p0;
for i = 1 : length
% % 状态方程更新
x_k = F * x_k;
p_k = F * p_k * F' + Q;
% % 量测方程更新
k_k = (p_k * H') * inv(H * p_k * H' + R);
z = [x_in.Data(i) 2.5]';
x_k = x_k + k_k * (z - H * x_k);
p_k = p_k - k_k * H * p_k;
plot_x(i) = x_k(1);
figure(1)