关注
关注
















【解决视觉引导多个位置需要标定多个位置的问题】
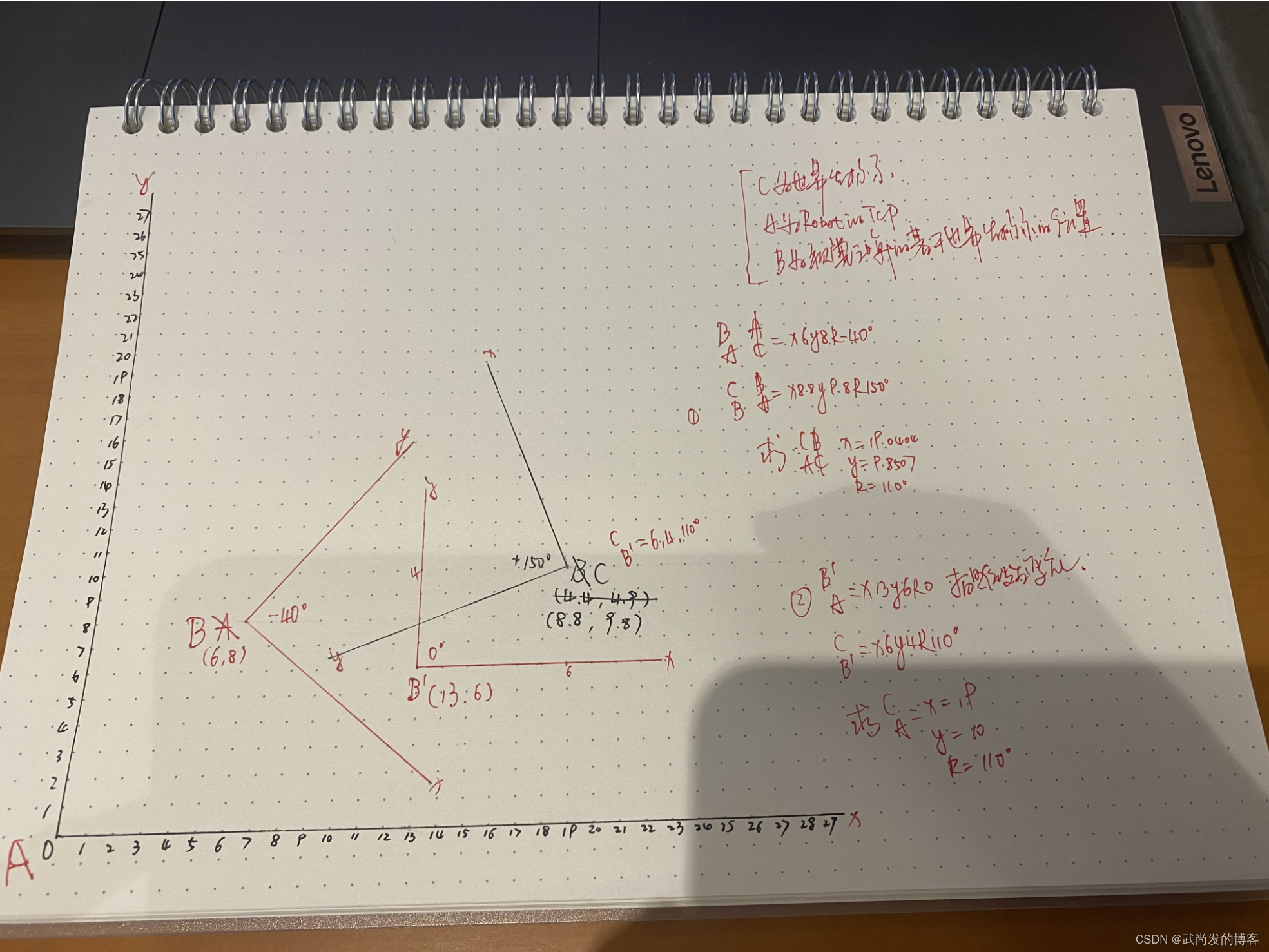
* 以下只针对2D定位,就是只有X、Y、Rz三个自由度的情况。**假设一种情况,当视觉给机器人做引导任务时,零件有多个,分布在料框里,视觉需要走多个位置去拍,那么只需要对第一个位置确定拍照位,确定试抓位,其余的拍照位置通过只平移XY,零件特征偏移归0的方式确定,这种方式当两垛零件方向不一样的时候就不得不单独走9点。为了解决这个问题,提高调试效率,现在分享一种通过计算来偷懒的方法。通过这种方式,只需要9点标定一次,然后通过告知机器人当前拍照位坐标,计算零件在Base下的坐标。