python 机器人视觉编程——入门篇(下)
本篇主要阅读对象、目标及概要
如今, Python 语言已经成为人工智能领域最热门的开发语言之一,她正在被越来越多的从事人工智能(包括机器人、机器视觉)的机构、和个人所使用,人们在使用 python 语言的灵活性、易用性及强大的应用模块的同时,也贡献她们的专业优秀模块,在科学各专业领域形成了科学计算的 python 模块资源,使得初学者便捷快速进行应用开发,降低重复劳动,避免重复制造“轮子”,快速实现程序的专业领域应用及设计规划落地,尤其,在机器人领域,作为机器人工程应用最重要的组成部分——机器视觉, python 及其生态开发者为我们提供了诸如 opencv-python 、 numpy 、 pillow 等图像处理所需的模块库,任何人可以通过 python 自带的工具( pip )方便的安装相对应的版本,进行研究或工程应用。
本篇的阅读对象是致力于使用 python 或者通过 python 编程想敲门进入机器人视觉领域的零 python 基础者,假设具备有一定的其它编程语言的基础经验,掌握了诸如“函数”、“类”、“变量”、“数据类型”、“条件判断”、“循环”、“线程”等概念。
本篇的目标是抛砖引玉地介绍从事机器视觉 python 研究开发或工程应用所需的最基础知识点,简要介绍图像结构及基础运算、图像处理 python 基础库、图像识别基本流程、图像坐标变化等知识,帮助初学者入门 python 的机器视觉开发。
本篇讲述的内容如下:
(1) Python 知识点一。主要讲述 python 的安装,及依赖环境的搭建,以及上手基础操作。
(2) Python 知识点二。主要讲述 python 机器视觉编程的基础而重要的概念,并配以相应的程序进行说明,重要的概念有: ” 缩进 ” 、 ” 函数 ” 、 ” 类 “ 、 ” 循环 “ 、基础数据类型等。
(3) Python 知识点三。主要讲述 python 机器视觉编程所需的较为高级的概念,有助于提高性能及简化算法。如: ” 生成器 “ 、 “ 线程 ” 、 ” 队列 “ 、 ” 装饰器 “ 等。
(4) 图像的读取与运算基础( A5 )。主要讲述图像从摄像头获取后,图像的数据结构形式、图像的类型、及简单的运算。
(5) 图像处理基础库简介( B5 )。主要介绍图像处理核心库 opencv ,以及人机界面 PySimpleGUI ,两者结合可以达到事半功倍的效果。
(6) 桌面物体识别基本流程( B14 )。主要介绍了当摄像头获取一张桌面物体的图像后,如果通过以上的知识、工具对图像中的物体进行有效识别,并标记出来。
(7) 图像的坐标计算( B13 )。主要介绍了如何将图像中的像素与摄像头外的现实空间坐标进行关联,从而实现图像中物体对应于现实世界的坐标定位,为机器人的抓取提供坐标。
本篇大部分凭笔者的经验及认识所写,难免会有不系统及遗误,还请读者批评指正。
A5 图像的读取与运算基础
5.1 图像的读取
对于初、中级图像处理人员,可以使用 opencv 的 python 库进行图像的读取,包括:
5.1.1 从磁盘的图像( .jpg , .npg , .gif 等等)读取
比如从 D 盘读取一张名叫 test.jpg 的图片到计算机的内存,并显示在窗口,可以在 python 编辑器里敲入如下代码:
import cv2
image=cv2.imread("D:\\test.JPG")#"" 内输入图像文件路径即可
cv2.imshow("test",image)

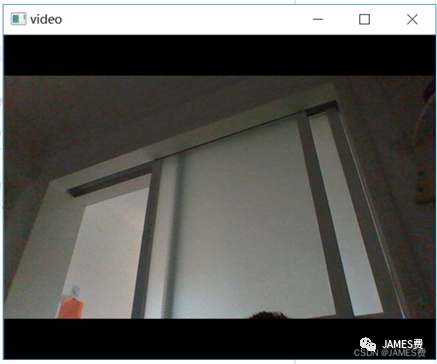
5.1.2 从摄像头里读取图像
如果想要从计算机自带的摄像头,或者 USB 摄像头读取采集的图像,可以这样进行读取和显示:
import cv2
cap=cv2.VideoCapture(0)
while(True):
sucess,frame=cap.read()# 连续读取图像帧
if sucess==True:# 如果读取图像成功
cv2.imshow("video",frame)# 通过窗口显示更新图像
key=cv2.waitKey(1)# 通过函数获取按下监盘的值
if key == ord("q"):# 当按下 q 键时
cap.release()# 当按下 q 键时,关闭摄像头
cv2.destroyAllWindows() # 当按下 q 键时,关闭显示窗口
break# 当按下 q 键时,退出 while 循环
5.2 图像的运算
5.2.1 图像的数据结构
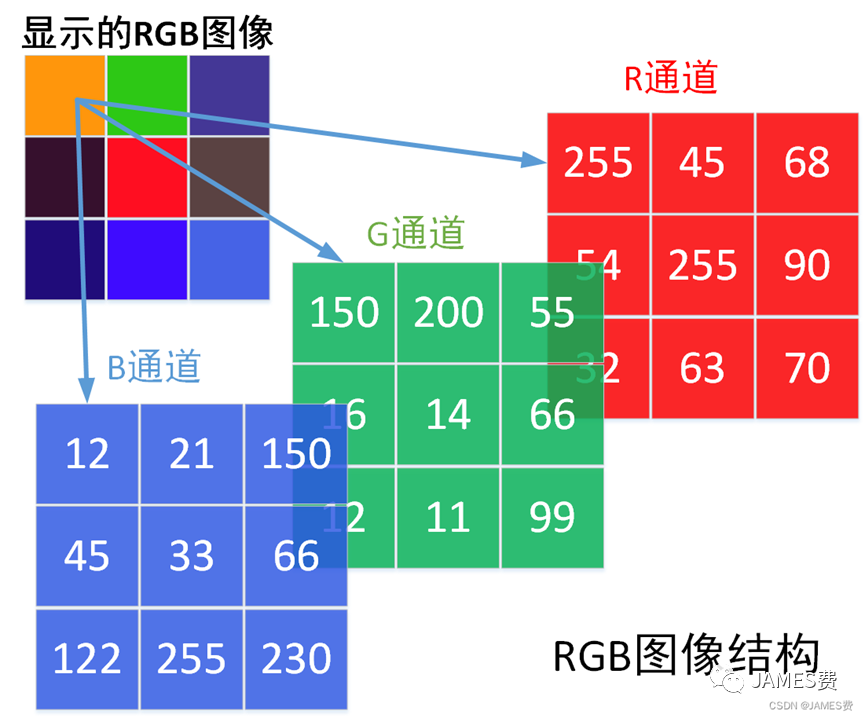
在结构上面,图像是由一个一个像素横竖排列组成的,每个像素都是有颜色的。本质上,对计算机来说,图像就是很多个按一定的组合顺序排列的数字组合。可以认为一副彩色的图像,是由三个二维的数组组合而成的数字集合。如下图所示,左上角是一副人类看到的,具有 9 个像素的 RGB 图像。这副图像,在计算机看来是几个二维数字组合 , 如下图 :
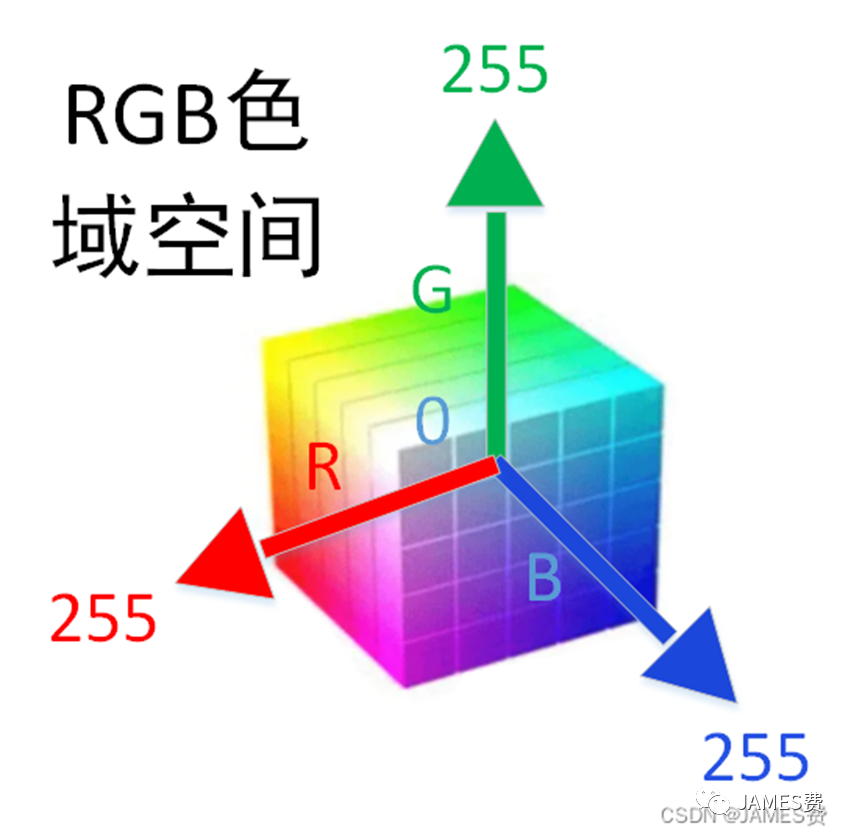
如上图所示,左上角的图像( RGB 格式),计算机用三个二维的数字组合来存储,显示时,根据 RGB 的格式显示规则,即,每个像素显示,根据此像素在对于三个通道的对应位置的数值(可以认为是一个坐标,如( 255 , 150 , 12 ))在 RGB 色域空间上查找到颜色后就显示出来(土黄色)。色域空间如下图:
我们可以用 python 读取一张小的图片,然后把他的数据打印出来:
import cv2
image=cv2.imread("D:\\test.JPG")
print(" 图像的数据结构 ",image.shape)
print(" 图像的像素数量 ",image.shape[0]*image.shape[0])
print(" 图像的详细数据 ",image)
打印输出如下:
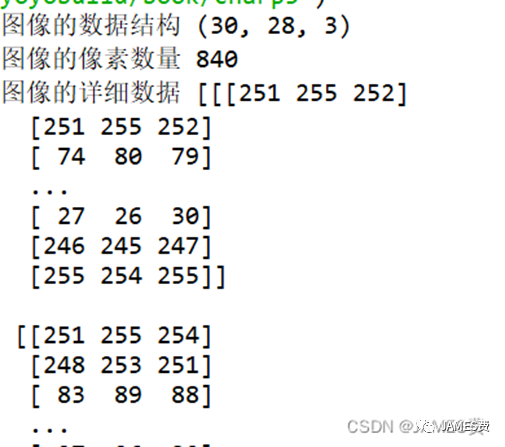
上图所示,所读取的图像,结构是,有 3 个维度(或三个通道),每个维度中:竖着有 30 组数字,横着有 28 组数字,总共有 840 个数字。每个数字都是 0-255 之间的整数。在 python 里,我们可以通过 *.shape* 函数查看图像的结构。
PS:opencv 对 rgb 色域的图像存储, 1-3 通道先后顺序分别对应的是( B 、 G 、 R ),而不是通常的 RGB 顺序。还需要注意的是,除了 RGB 格式存储外,还有其它如 HSV 、 LAB 等色域空间的存储,有些色域空间的通道值最大不是 255 ,有可能是 180. 由于深度有限,本篇只对 BGR 空间的图像进行探讨。
5.2.2 图像的像素与数据存储结构的对应规则
图像像素一般规定的坐标是以左上角为原点,分别向右向下增加坐标的数值,如下图:
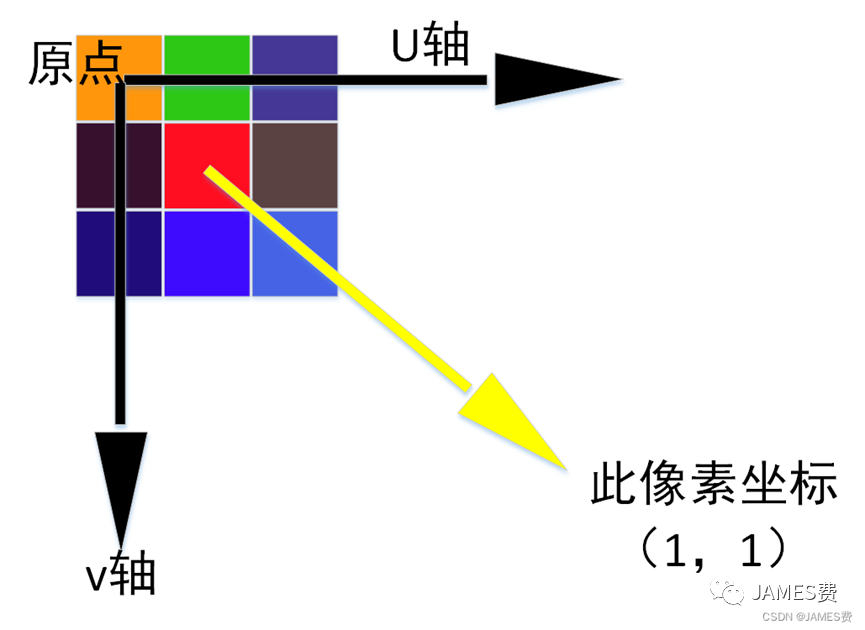
像素坐标一般以 u , v 称呼,横着叫 u 轴,竖着叫 v 轴。比如上图红色像素的坐标是( 1 , 1 ),左上角的像素的坐标是 (0,0) 。如果我们要知道图像某个像素的各通道数值是多少,我们可以利用 python 的“ [u,v,x] ”操作,操作如下:
import cv2
image=cv2.imread("D:\\test.JPG")
# 获取图像左上角像素,的第一个通道( B 通道)的值
print(" 图像左上角像素,的第一个通道( B 通道)的值是: ",image[0,0,0])
# 获取图像中坐标为 (u,v)= ( 9,10 )的像素,的第二通道( G 通道)的值
print(" 获取图像中坐标为 (u,v)= ( 9,10 )的像素,的第二通道 G 通道)的值是: ",image[10,9,1])
# 获取图像中坐标为 (u,v)= ( 9,10 )的像素,的 3 个通道(的值
print(" 获取图像中坐标为 (u,v)= ( 9,10 )的像素,的 3 个通道(的值是: ",image[10,9,:3])
输出结果:

5.2.3 图像的像素信息获取、运算
知道了图像本质是 3 个维度的二维数据后,以及图像各个像素坐标与数据存储结构的对应关系,我们就可以很容易的对图像中的任意位置像素进行计算,包括:指定像素的提取、同种颜色像素的查找及个数的统计、或者是更改一下特定像素的三个 RGB “坐标”数值,改变像素的颜色等等。简单演示如下:
( 1 )像素的统计运算
直方图的本质其实就是对图像象素进行同类项合并,并统计出 0-255 (或最大值)的颜色域内,各个像素的分布情况。
import cv2
import matplotlib.pyplot as plt# 用于绘制统计图
image=cv2.imread("D:\\test.JPG")
B=[0 for i in range(256)]# 创建一个具有 256 个长度的列表,分别用于存储 0-255 值得象素个数
G=[0 for i in range(256)]# 创建一个具有 256 个长度的列表,分别用于存储 0-255 值得象素个数
R=[0 for i in range(256)]# 创建一个具有 256 个长度的列表,分别用于存储 0-255 值得象素个数
# 对图像得 B 通道的数值进行遍历,将通道内同类的数值个数,根据数值放入创建的列表 value 中
for u in range(image.shape[1]):
for v in range(image.shape[0]):
B[image[v,u,0]]=B[image[v,u,0]]+1
G[image[v,u,1]]=G[image[v,u,1]]+1
R[image[v,u,2]]=R[image[v,u,2]]+1
# 画出直方图
x=[i for i in range(256)]# 横坐标
fig=plt.figure()
fig.canvas.set_window_title(' 直方图 ')
plt.subplot(3,1,1)
plt.bar(x,B,color='b')
plt.subplot(3,1,2)
plt.bar(x,G,color='g')
plt.subplot(3,1,3)
plt.bar(x,R,color='r')
plt.show()
输出结果:
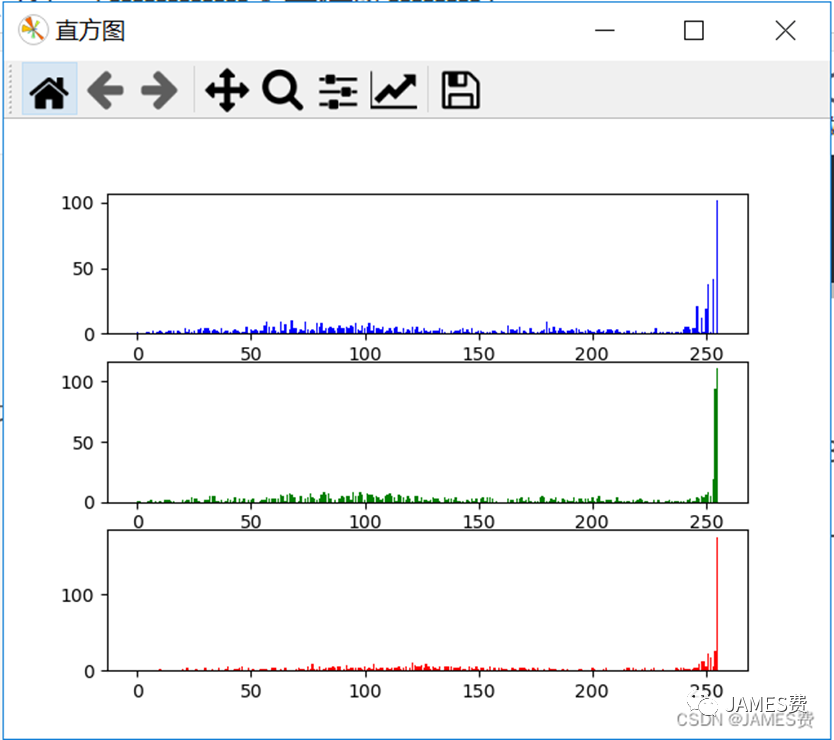
由上图可以看出,图像在各通道,数值 >250 的象素个数分布是比较多的,即亮的区域比较多。
( 2 )像素的过滤与查询
我们可以根据图像的颜色特点,设置查找条件,找出图像中感兴趣的部位,过滤掉其它不感兴趣的部位,下面例子是设置条件,找到图像中红色块,并把这个区域单独显示:
import cv2
import matplotlib.pyplot as plt# 用于绘制统计图
image=cv2.imread("D:\\test.JPG")
black=image*0# 这是一张全为 0 的黑色底图,图的大小和 image 是一样的
# 设置查找颜色的条件 红色
B=[0,255]# 蓝色通道的范围
G=[0,50]# 绿色通道的范围
R=[130,255]# 红色通道的范围
# 下面我们将同时符合以上条件的象素给找出来,并放入底图 black 中
for u in range(image.shape[1]):
for v in range(image.shape[0]):
if image[v,u,0]>=B[0] and image[v,u,0]<=B[1]:
if image[v,u,1]>=G[0] and image[v,u,1]<=G[1]:
if image[v,u,2]>=R[0] and image[v,u,2]<=R[1]:
black[v,u,:] = image[v,u,:]
cv2.imshow('',black)
输出结果如下 :
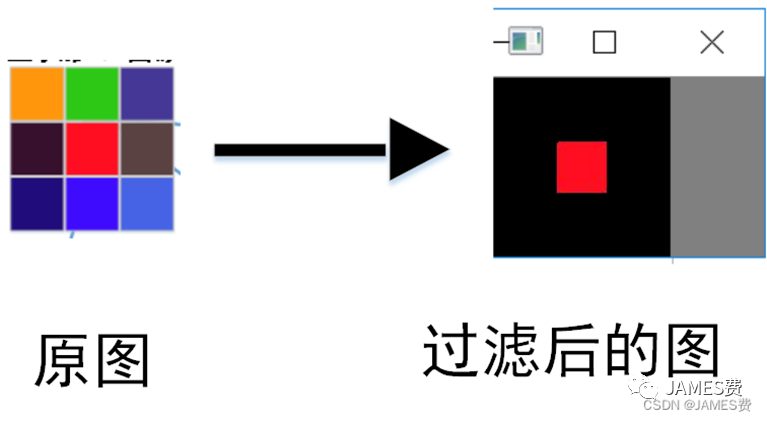
如上图所示,对象素进行按照条件过滤,可以筛选出我们感兴趣的部分。
以上是通过常用的数值比较等运算,对图像进行的一些基础运算,可以对图像进行分析、和区域查找。然而,图像的处理原不止这些操作,幸运的是,现在已经不需要从 0 开始造轮子,牛人们已经帮我们实现了绝大多数的图像处理应用,并提供给我们调用, opencv 库里面现成的图像处理函数非常多,我们稍微了解一下原理,就可以拿来,根据需要灵活应用了。
B5 图像处理基础库简介
本节将介绍强大的图像处理库 opencv 的一些实用函数,及一个强大的 gui 库,两者结合起来应用,能起到事半功倍的效果。
5.1 opencv 常用处理函数纪要
首先,我们来熟悉一下一个 OpenCV 这个软件库。 OpenCV 是一个基于 Apache2.0 许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在 Linux 、 Windows 、 Android 和 Mac OS 操作系统上。 OpenCV 提供的视觉处理算法非常丰富,并且它部分以 C 语言编写,加上其开源的特性,处理得当,不需要添加新的外部支持也可以完整的编译链接生成执行程序,所以很多人用它来做算法的移植, OpenCV 的代码经过适当改写可以正常的运行在 DSP 系统和 ARM 嵌入式系统中。对于 python 语言, opencv 提供了模块支持。
P s :需要指出的是, opencv 这个多适用于对性能、可靠性要求不是很高的场景,在正式的工业场景,应用 opencv ,可能需要进行性能、及稳定性的优化,或者使用其它商业成熟的视觉产品。 Opencv 对机器视觉的研究学习人员是应用较多的。
Opencv 在 python 中,主要是通过 cv2. 函数名 ( 参数 1, 参数 2… 约定常数 ) 的形式进行应用,其中约定的常数基本为整数,以类似 cv2.IMREAD_COLOR 的大写字符串表示。
比较核心的函数如下表所示:
|
序号 |
函数名 |
用途 |
参数含义 |
|
1 |
cv2.imread( 参数 1 ,参数 2)
例 : img=cv2.imread(“ D:\\image.jpg ”) |
读取指定路径的图像 |
参数 1 : 图片的路径,如: D:\\image.jpg 参数 2 (非必选,为 cv 的常数): cv2.IMREAD_COLOR :读入彩色图像,忽略图像的透明度, 默认参数 。 cv2.IMREAD_GRAYSCALE :以灰度模式读入图像 cv2.IMREAD_UNCHANGED :读入一幅图像,并且包括图像的 alpha 通道 ps :对于 png 格式图片,有时候会有第四个通道,即 alpha 透明通道,存储了象素的透明度信息 |
|
2 |
cv2.imshow( 参数 1 ,参数 2) 例: cv2.imshow(“name”,img) |
创建窗口并显示图像 |
参数 1 : 窗口名字,字符串格式 参数 2 : 读入的图像变量 |
|
3 |
cv2.destroyWindow( 参数 1) 例: cv2.destroyWindow(‘name’) |
关闭并销毁指定的窗口 |
参数 1 : 窗口名,字符串
|
|
4 |
cv2.destroyAllWindows() 例 : cv2.destroyAllWindows() |
关闭并销毁所有已建窗口 |
无 |
|
5 |
cv2.imwrite( 参数 1 , 参数 2) 例 : cv2.imwrite(“ D:\\image.jpg ” ,img) |
保存图片 |
参数 1 : 保存的路径及文件名 参数 2 : 图像变量 |
|
6 |
cv2.VideoCapture( 参数 1) 例 : cap= cv2.VideoCapture(0) |
获取摄像头返回对象 cap |
参数 1 : 为摄像头的设备号,如: 0 , 1 , … |
|
7 |
cap.read() 例 : res,frame=cap.read() |
从摄像头对象读取一副实时图像 |
无 |
|
8 |
cv2.cvtColor( 参数 1 ,参数 2) 例 : hsv_img=cv2.cvtColor(img, cv2.COLOR_BGR2HSV ) |
转换图像的颜色空间 |
参数 1 : 被转换的图片 参数 2 :( cv2.COLOR_*2* ) 转换的类型,包括: BGR 转灰度图 cv2.COLOR_BGR2GRAY , BGR 转 RGB 图 cv2.COLOR_BGR2RGB , BGR 转 HSV 空间 cv2.COLOR_BGR2HSV , BGR 转 Lab 空间 cv2.COLOR_BGR2Lab |
|
9 |
cv2.inRange (参数 1 ,参数 2 ,参数 3 ) 例 : new_img= cv2.inRange(img,np.array([20,20,25]), np.array([80,150,255])) |
根据参数 2 和参数 3 最小最大范围,过滤出范围内的区域为白色 255 ,其余为黑色 0 |
参数 1 : 指的被处理的图像 参数 2 :( lower, 三个值) 条件最小值,指的是图像中如低于这个值,图像值变为 0 ,如: np.array([20,20,25]) 参数 3 :( upper ,三个值) 条件最大值,指的是图像中高于这个值,图像值变为 0 而在参数 1lower ~参数 2upper 之间的值变成 255, 如: np.array([20,20,25]) |
|
10 |
cv2.blur (参数 1, 参数 2 ) 例 : Blur_img= cv2.blur(img,(3,3)) |
均值模糊 |
参数 1 : 指的被处理的图像 参数 2 : ( 奇数,奇数 ) 卷积核大小,如( 3,3 ),( 5 , 5 ) 其他参数一般为默认 |
|
11 |
cv2.GaussianBlur( 参数 1, 参数 2) 例 : GBlur_img= cv2. GaussianBlur (img,(3,3)) |
高斯模糊 |
参数 1 : 指的被处理的图像 参数 2 : ( 奇数,奇数 ) 卷积核大小,如( 3,3 ),( 5 , 5 ) 其他参数一般为默认 |
|
12 |
cv2.Canny( 参数 1, 参数 2, 参数 3, apertureSize= 参数 4) 例 : # 先转灰度图 gray_img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) Canny_img= cv2.Canny(gray_img, 100, 200, apertureSize=3) |
图像边缘检测 |
参数 1 : 指的被处理的灰度图像 参数 2 : 过滤最小阈值 参数 3 : 最大阈值,使用此参数进行明显的边缘检测 参数 4 : sobel 算子大小(可不设定),扩大算子大小,会获得更多的细节 |
|
13 |
cv2.threshold( 参数 1, 参数 2, 参数 3, 参数 4) 例 : # 先转灰度图 gray_img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) thred_img= cv2.threshold(gray_img,127,255, cv2.THRESH_BINARY) |
阈值分割,分割成黑白图 |
参数 1 : 指的被处理的灰度图像 参数 2 : 过滤最小阈值 参数 3 : 最大阈值 参数 4 :( 0-4 常数) 二值方法 cv2.THRESH_BINARY (黑白二值, 0 ) cv2.THRESH_BINARY_INV (黑白二值反转, 1 ) cv2.THRESH_TRUNC (得到的图像为多像素值, 2 ) cv2.THRESH_TOZERO ( 3 ) cv2.THRESH_TOZERO_INV ( 4 ) |
|
14 |
cv2.resize( 参数 1, 参数 2,fx= 参数 3,fy= 参数 4, interpolation= 参数 5) 例: resize_img=cv2.resize(img,(2*img.shape[0],2*img.shape[1]),fx=1,fy=1,interpolation=cv2.INTER_LINEAR) |
缩放图像 |
参数 1 : 指的被处理的图像 参数 2 : 被缩放后的图像长宽,如 (100,200) 参数 3 : 图像宽度的缩放比例,可默认不设 参数 4 : 图像高度的缩放比例,可默认不设 参数 5 :( 0-4 的常数) 插值方法,可默认不设 |
|
15 |
cv2.erode( 参数 1, 参数 2, 参数 3) 例: # 定义核 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)) # 椭圆结构 erode_img=cv2.erode(b_img,kernel,3) |
腐蚀图像,使前景部分变细 , 去细小噪点 |
参数 1 : 指的被处理的二值或灰度图像 参数 2 : 各形状及大小的卷积核 , 矩形: MORPH_RECT; 交叉形: MORPH_CROSS; 椭圆形: MORPH_ELLIPSE; 参数 3 : 迭代次数 |
|
16 |
cv2.dilate( 参数 1, 参数 2, 参数 3) 例: # 定义核 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)) # 椭圆结构 dilate_img=cv2.dilate (b_img,kernel,3) |
膨胀图像,将前景物体变大,连接较近的部分 |
参数 1 : 指的被处理的二值或灰度图像 参数 2 : 各形状及大小的卷积核 , 矩形: MORPH_RECT; 交叉形: MORPH_CROSS; 椭圆形: MORPH_ELLIPSE; 参数 3 : 迭代次数 |
|
17 |
cv2.findContours( 参数 1, 参数 2, 参数 3) 例: image,contours,hierarchy=cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE) #contours 即为轮廓像素坐标点 |
获取图像物体轮廓(多个像素的坐标点集合) |
参数 1 : 指的被处理的二值或灰度图像 参数 2 :( 0-3 常数) 轮廓的模式。 cv2.RETR_EXTERNAL 只检测外轮廓; cv2.RETR_LIST 检测的轮廓不建立等级关系; cv2.RETR_CCOMP 建立两个等级的轮廓,上一层为外边界,内层为内孔的边界。如果内孔内还有连通物体,则这个物体的边界也在顶层; cv2.RETR_TREE 建立一个等级树结构的轮廓 参数 3 : (1-4 常数 ) 轮廓的近似方法。 cv2.CHAIN_APPROX_NOME 存储所有的轮廓点,相邻的两个点的像素位置差 <=1 ; cv2.CHAIN_APPROX_SIMPLE 压缩水平方向、垂直方向、对角线方向的元素,只保留该方向的终点坐标; cv2.CHAIN_APPROX_TC89_L1 和 cv2.CHAIN_APPROX_TC89_KCOS 使用 teh-Chinl chain 近似算法
|
|
18 |
cv2.drawContours( 参数 1, 参数 2, 参数 3, 参数 4, 参数 5) 例: cv2.drawContours(img, contours,-1, ( 255 , 0 , 255 ) ,3 ) |
根据查找的轮廓,绘制轮廓 |
参数 1 : 同源同尺寸的图像 参数 2 : 轮廓变量, list 类型。 参数 3 : 指定绘制轮廓 list 中的哪条轮廓,如果是 -1 ,则绘制其中的所有轮廓 参数 4 : 轮廓的颜色,如( 255 , 0 , 255 )。 参数 5 : 轮廓厚度,如, 3 。
|
|
19 |
cv2.goodFeaturesToTrack( 参数 1 ,参数 2 ,参数 3 ,参数 4) 例子: corners = sg.running_trinket() else False
def make_window(theme=None):
NAME_SIZE = 23
def name(name): dots = NAME_SIZE-len(name)-2 return sg.Text(name + ' ' + '•'*dots, size=(NAME_SIZE,1), justification='r',pad=(0,0), font='Courier 10')
sg.theme(theme)
# NOTE that we're using our own LOCAL Menu element if use_custom_titlebar: Menu = sg.MenubarCustom else: Menu = sg.Menu
treedata = sg.TreeData()
treedata.Insert("", '_A_', 'Tree Item 1', [1234], ) treedata.Insert("", '_B_', 'B', []) treedata.Insert("_A_", '_A1_', 'Sub Item 1', ['can', 'be', 'anything'], )
layout_l = [ [name(' 文本 '), sg.Text('Text')], [name(' 输入 '), sg.Input(s=15)], [name(' 多行文本 '), sg.Multiline(s=(15,2))], [name(' 输出 '), sg.Output(s=(15,2))], [name(' 下拉框 '), sg.Combo(sg.theme_list(), default_value=sg.theme(), s=(15,22), enable_events=True, readonly=True, k='-COMBO-')], [name(' 选择按钮 '), sg.OptionMenu(['OptionMenu',],s=(15,2))], [name(' 确认框 '), sg.Checkbox('Checkbox')], [name(' 单选框 '), sg.Radio('Radio', 1)], [name(' 自增减 '), sg.Spin(['1','2','3','4','5'], s=(15,2))], [name(' 按钮 '), sg.Button('Button')], [name(' 下拉按钮 '), sg.ButtonMenu('ButtonMenu', sg.MENU_RIGHT_CLICK_EDITME_EXIT)], [name(' 滑块 '), sg.Slider((0,10), orientation='h', s=(10,15))], [name(' 多行选择框 '), sg.Listbox(['Listbox', 'Listbox 2'], no_scrollbar=True, s=(15,2))], [name(' 图片显示 '), sg.Image(sg.EMOJI_BASE64_HAPPY_THUMBS_UP)], [name(' 图片编辑 '), sg.Graph((125, 50), (0,0), (125,50), k='-GRAPH-')] ]
layout_r = [[name(' 画布 '), sg.Canvas(background_color=sg.theme_button_color()[1], size=(125,40))], [name(' 进度条 '), sg.ProgressBar(100, orientation='h', s=(10,20), k='-PBAR-')], [name(' 表格 '), sg.Table([[1,2,3], [4,5,6]], ['Col 1','Col 2','Col 3'], num_rows=2)], [name(' 树 '), sg.Tree(treedata, ['Heading',], num_rows=3)], [name(' 水平分割线 '), sg.HSep()], [name(' 垂直分割线 '), sg.VSep()], [name(' 区域 '), sg.Frame('Frame', [[sg.T(s=15)]])], [name(' 布局列 '), sg.Column([[sg.T(s=15)]])], [name('Tab, TabGroup'), sg.TabGroup([[sg.Tab('Tab1',[[sg.T(s=(15,2))]]), sg.Tab('Tab2', [[]])]])], [name('Pane'), sg.Pane([sg.Col([[sg.T('Pane 1')]]), sg.Col([[sg.T('Pane 2')]])])], [name('Push'), sg.Push(), sg.T('Pushed over')], [name('VPush'), sg.VPush()], [name('Sizer'), sg.Sizer(1,1)], [name('StatusBar'), sg.StatusBar('StatusBar')], [name('Sizegrip'), sg.Sizegrip()] ]
# Note - LOCAL Menu element is used (see about for how that's defined) layout = [[Menu([['File', ['Exit']], ['Edit', ['Edit Me', ]]], k='-CUST MENUBAR-',p=0)], [sg.T('PySimpleGUI Elements - 可用下拉框改变风格 ', font='_ 14', justification='c', expand_x=True)], [sg.Checkbox('Use Custom Titlebar & Menubar', use_custom_titlebar, enable_events=True, k='-USE CUSTOM TITLEBAR-', p=0)], [sg.Col(layout_l, p=0), sg.Col(layout_r, p=0)]]
window = sg.Window('PySimpleGUI 常用元素集合 ', layout, finalize=True, right_click_menu=sg.MENU_RIGHT_CLICK_EDITME_VER_EXIT, keep_on_top=True, use_custom_titlebar=use_custom_titlebar)
window['-PBAR-'].update(30) # Show 30% complete on ProgressBar window['-GRAPH-'].draw_image(data=sg.EMOJI_BASE64_HAPPY_JOY, location=(0,50)) # Draw something in the Graph Element
return window
window = make_window()
while True: event, values = window.read() # sg.Print(event, values) if event == sg.WIN_CLOSED or event == 'Exit': break if event == 'Edit Me': sg.execute_editor(__file__) if values['-COMBO-'] != sg.theme(): sg.theme(values['-COMBO-']) window.close() window = make_window() if event == '-USE CUSTOM TITLEBAR-': use_custom_titlebar = values['-USE CUSTOM TITLEBAR-'] sg.set_options(use_custom_titlebar=use_custom_titlebar) window.close() window = make_window() elif event == 'Version': sg.popup_scrolled(sg.get_versions(), __file__, keep_on_top=True, non_blocking=True) window.close()
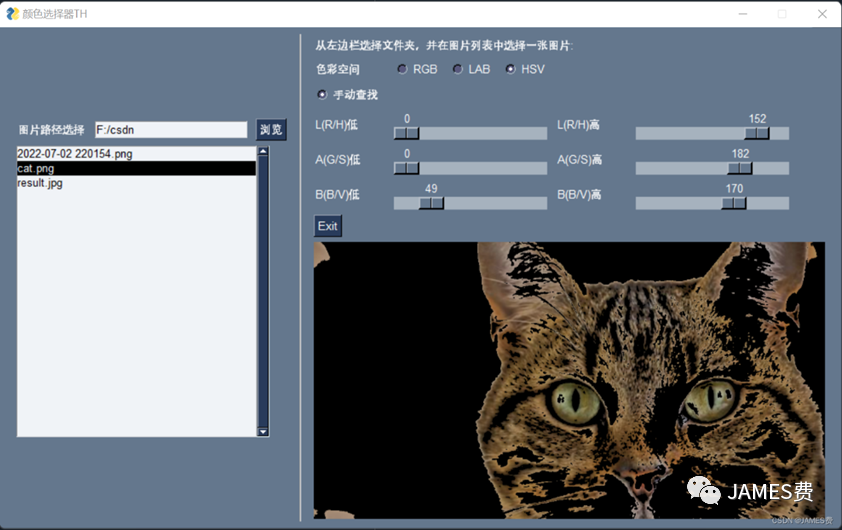
5.3 opencv+PySimpleGUI 实现图片颜色查找应用实例本小节示例,利用 opencv 的颜色查找函数 cv2.inRange 和 PySimpleGUI 的滑动条等工具,做了一个可对任意图片进行手动颜色查找的小工具: 效果如下:
如上图所示,小程序可以在左边栏选择对应的文件夹并显示带有图片的列表,部分代码如下: ( 1 )利用 PySimpleGUI 打开文件夹并读入图片文件到列表框
left_column = [ [ sg.Text(" 图片路径选择 "), sg.In(size=(25, 1), enable_events=True, key="-FOLDER-"), sg.FolderBrowse(' 浏览 '), ], [ sg.Listbox( values=[], enable_events=True, size=(40, 20), key="-FILE LIST-" ) ], ] """ 此部分省略 """ if event == "-FOLDER-": folder = values["-FOLDER-"] try: file_list = os.listdir(folder) except: file_list = []
fnames = [ f for f in file_list if os.path.isfile(os.path.join(folder, f)) and f.lower().endswith((".png", ".gif",".jpg")) ] win["-FILE LIST-"].update(fnames) if len(fnames)==0: loaded=None
if event == "-FILE LIST-": try: imgname = os.path.join( values["-FOLDER-"], values["-FILE LIST-"][0] ) inputimg=cv2.imread(imgname) print(imgname) loaded=1 except: pass
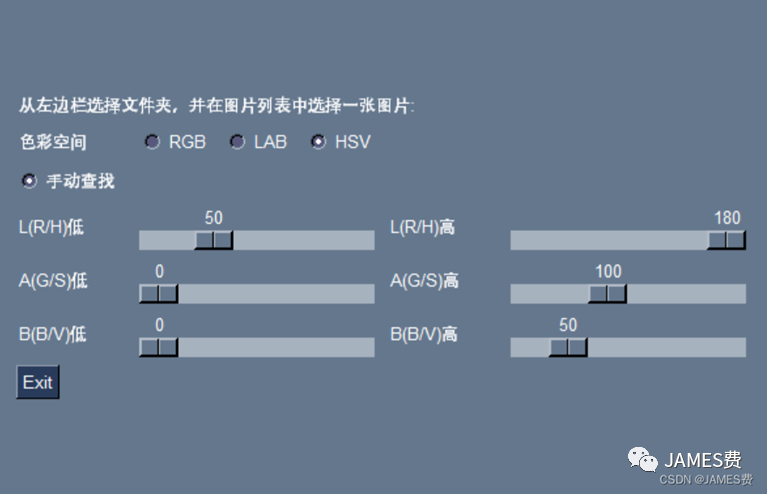
( 2 )利用 PySimpleGUI 创建以滑动条为主的颜色查找 UI
right_column = [ [sg.Text(" 从左边栏选择文件夹,并在图片列表中选择一张图片 :")], [ sg.Text(' 色彩空间 ',size=(10, 1)),sg.Radio('RGB', "333",key="-RGB-"), sg.Radio('LAB', "333",key="-LAB-"), sg.Radio('HSV', "333",default=True,key="-HSV-")], [sg.Radio(' 手动查找 ', "111",default=True,key="-manhand-") ], [sg.Text('L(R/H) 低 ',size=(10, 1)),sg.Slider((0, 255), argTH["LOW"][0], 1, orientation='h', size=(20, 15), key='-lrhlow-'), sg.Text('L(R/H) 高 ',size=(10, 1)), sg.Slider((0, 255), argTH["UPE"][0], 1, orientation='h', size=(20, 15), key='-lrhup-'), ], [sg.Text('A(G/S) 低 ',size=(10, 1)),sg.Slider((0, 255), argTH["LOW"][1], 1, orientation='h', size=(20, 15), key='-agslow-'), sg.Text('A(G/S) 高 ',size=(10, 1)),sg.Slider((0, 255), argTH["UPE"][1], 1, orientation='h', size=(20, 15), key='-agsup-'), ], [sg.Text('B(B/V) 低 ',size=(10, 1)),sg.Slider((0, 255), argTH["LOW"][2], 1, orientation='h', size=(20, 15), key='-bbvlow-'), sg.Text('B(B/V) 高 ',size=(10, 1)), sg.Slider((0, 255), argTH["UPE"][2], 1, orientation='h', size=(20, 15), key='-bbvup-') ], [sg.Button('Exit')], [sg.Image(filename='', key='-IMAGE-')], ]
( 3 )颜色查找后台我们用 opencv 的 cv2.inRange 函数(可以参考上面的表格)核心代码如下: """ 通过颜色上下限,过滤图像 """ if inputimg.shape[2]==3: if mod=='rgb'or mod==0: rhl=cv2.cvtColor(inputimg,cv2.COLOR_BGR2RGB) elif mod=='hsv'or mod==1: rhl = cv2.cvtColor(inputimg, cv2.COLOR_BGR2HSV) elif mod=='lab'or mod==2: rhl = cv2.cvtColor(inputimg, cv2.COLOR_BGR2LAB) # 变换图像 = cv2.GaussianBlur( 变换图像 , (7, 7), 0) if type(LOW)==type([]): LOW=np.array(LOW) if type(UPE)==type([]): UPE=np.array(UPE) mask = cv2.inRange(rhl, LOW, UPE) output = cv2.bitwise_and(inputimg, |