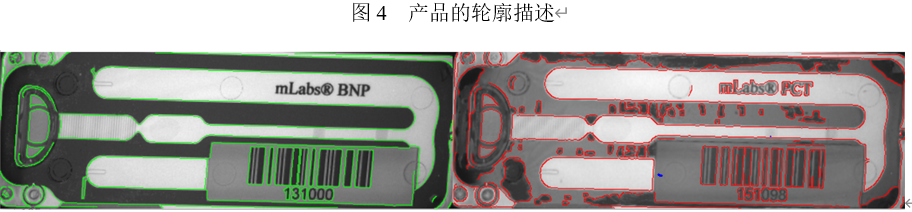
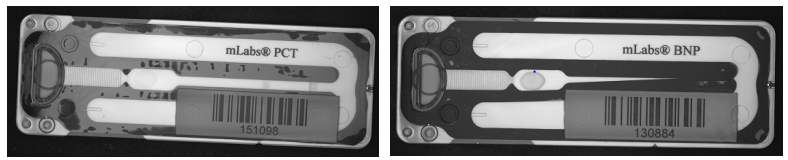
如下图所示为某种用于试剂检验的产品,需要利用机器视觉的方法检测产品的缺陷。 本设计的目的是综合运用图像处理的知识,检测产品是否有严重缺陷。 在检测算法之前, 作为图像的预处理, 检测和定位产品的外轮廓,矫正产品的姿态,对于后续的算法处理有着重要的意义。

数据为真实的工业产品成像,分为放在OK,NG目录下。数据提取地址
链接
提取码:s3jl,OK目录下的图像没有缺陷,NG目录是有缺陷的产品,包括如下两种缺陷:
随着机器学习的发展,对于工业产品的缺陷检测,深度网络模型检测缺陷的准确率远远高于传统图像处理算法。但是由于成本过高和深度学习的不可解释性,使用传统图像处理方法检测产品缺陷检测在工业上仍占着很大一部分比例。本次课程设计主要是针对磁盘的两种缺陷:胶带和大气泡进行检测。
基于上述的缺陷检测的方法分别对OK图片和两种NG图片进行检测,结果如表1所示。由表1可知本实验的检测方法在OK图上的正确率只有0.87,原因可能是受光照的影响而导致图片在边缘检测时边缘差异变大而导致轮廓受影响较大;在胶带缺陷上正确率是0.80,原因是缺陷主要集中在产品中间的白色宽带上,使得轮廓的检测并没有很多(小于所设的阈值);而检测方法在大气泡缺陷的图片上正确率有1.00,这是因为大气泡缺陷形成了大量”离散块”,使得检测到的轮廓很多,轮廓个数很容易超过阈值。
本次实验主要是针对工业产品的缺陷进行检测,我主要是利用了Hu矩描述图片的不变性来判断轮廓的所属类型来达到检测缺陷的目的,只能是粗略地定位,因为绝大部分的缺陷轮廓都是曲线,如果需要更加精确的定位,可能需要运用特征描述子进行特征匹配来实现。其次就是我的方法的误检地区域很多,特别是在图片的喇叭部分。总的来说,检测方法不是很理想,还需要做更多的尝试来达到精确定位缺陷的目标。
代码
import cv2 as cv
import math
import numpy as np
import os
def Horizontal_correction(path) :
img = cv.imread(path, cv.IMREAD_COLOR)
img = cv.resize(img, (700, 700))
img = img[300 : 650]
gimg = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
canny = cv.Canny(gimg, 70, 150)
lines = cv.HoughLines(canny, 1, np.pi / 180, 200)
lines = np.array(lines)
angles = []
for line in lines:
for rho, theta in line :
a = np.cos(theta)
b = np.sin(theta)
x0 = rho * a
y0 = rho * b
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * a)
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * a)
dy = y2 - y1
dx = x2 - x1
angle = math.atan2(dy, dx) * 180 / math.pi
angles.append(angle)
angles = sorted(angles, key = lambda x : x)
best_angle = 0
angles_temp = []
i = 0
while i <= len(angles) - 2 :
for j in range(i, len(angles)) :
if abs(angles[j] - angles[i]) < 1e-2 :
if j == len(angles) - 1 :
angles_temp.append(angles[i : j + 1])
i = j
break
else :
angles_temp.append(angles[i : j])
i = j
break
cnt = 0
for i, lst in enumerate(angles_temp) :
if cnt < len(lst) :
cnt = len(lst)
best_angle = angles_temp[i][0]
RotateMatrix = cv.getRotationMatrix2D((img.shape[1] / 2, img.shape[0] / 2), best_angle, 1)
RotImg = cv.warpAffine(img, RotateMatrix, (img.shape[1], img.shape[0]))
return RotImg
def Rect(contours) :
areaInitial = 0
for i in range(len(contours)) :
contour = contours[i].squeeze()
min_x, min_y = np.min(contour, axis = 0)
max_x, max_y = np.max(contour, axis = 0)
area = (max_x - min_x) * (max_y - min_y)
if area > areaInitial :
areaInitial = area
rectPoint = [min_y, min_x, max_y, max_x]
return rectPoint
def Biggest(contours) :
biggest = np.array(
[])
max_Area = 0
for contour in contours :
area = cv.contourArea(contour)
if area > 5000:
C = cv.arcLength(contour, True)
approx = cv.approxPolyDP(contour, 0.02 * C, True)
if area > max_Area and len(approx) == 4:
biggest = approx
max_Area = area
return biggest
def FindContours(img) :
imgGray = img.copy()
imgBlur = cv.GaussianBlur(imgGray, (5, 5), 1)
imgCanny = cv.Canny(imgBlur, 100, 200)
kernel = np.ones((5, 5))
imgDilate = cv.dilate(imgCanny, kernel, iterations = 2)
imgErode = cv.erode(imgDilate, kernel, iterations = 1)
contours, hierarchy = cv.findContours(imgErode, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
return contours
def Reorder(points):
points = points.reshape((4, 2))
Newpoints = np.zeros((4, 2), dtype=np.int32)
xsum = np.sum(points, axis = 1)
xdiff = np.diff(points, axis = 1)
Newpoints[0] = points[np.argmin(xsum)]
Newpoints[3] = points[np.argmax(xsum)]
Newpoints[1] = points[np.argmin(xdiff)]
Newpoints[2] = points[np.argmax(xdiff)]
return np.float32(Newpoints)
def ImageAlignment(img1, img2) :
contours1 = FindContours(img1)
contours2 = FindContours(img2)
rectPoint1 = Rect(contours1)
rectPoint2 = Rect(contours2)
img1 = img1[rectPoint1[0] : rectPoint1[2], rectPoint1[1] : rectPoint1[3]]
img2 = img2[rectPoint2[0] : rectPoint2[2], rectPoint2[1] : rectPoint2[3]]
img2 = cv.resize(img2, (img1.shape[1], img1.shape[0]), cv.INTER_CUBIC)
contours1 = FindContours(img1)
contours2 = FindContours(img2)
targetAreaPoint1 = Biggest(contours1)
targetAreaPoint2 = Biggest(contours2)
pts1 = np.float32(Reorder(targetAreaPoint1))
pts2 = np.float32(Reorder(targetAreaPoint2))
pts = np.float32([[0, 0], [img1.shape[1], 0], [0, img1.shape[0]], [img1.shape[1], img1.shape[0]]])
RotateMatrix1 = cv.getPerspectiveTransform(pts1, pts)
RotateMatrix2 = cv.getPerspectiveTransform(pts2, pts)
out_img1 = cv.warpPerspective(img1, RotateMatrix1, (img1.shape[1], img1.shape[0]))
out_img2 = cv.warpPerspective(img2, RotateMatrix2, (img1.shape[1], img1.shape[0]))
return out_img1, out_img2
def Detect(img1, img2) :
cimg1, cimg2 = img1.copy(), img2.copy()
cimg1 = cv.cvtColor(cimg1, cv.COLOR_BGR2GRAY)
cimg2 = cv.cvtColor(cimg2, cv.COLOR_BGR2GRAY)
imgBlur1 = cv.GaussianBlur(cimg1, (3, 3), 0)
imgBlur2 = cv.GaussianBlur(cimg2, (3, 3), 0)
kernel = np.ones((3, 3))
imgErode1 = cv.erode(imgBlur1, kernel, iterations = 1)
imgErode2 = cv.erode(imgBlur2, kernel, iterations = 1)
imgCanny1 = cv.Canny(imgErode1, 70, 120)
imgCanny2 = cv.Canny(imgErode2, 70, 120)
contours1, hierarchy1 = cv.findContours(imgCanny1, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
contours2, hierarchy2 = cv.findContours(imgCanny2, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
contoursNum = 0
for i in range(len(contours2)) :
defects = []
for j in range(len(contours1)) :
similiarity = cv.matchShapes(contours2[i], contours1[j], cv.CONTOURS_MATCH_I1, 0)
defects.append(similiarity)
min_similarity = min(defects)
if min_similarity > 0.45 :
cv.drawContours(img2, contours2, i, (0, 255, 0), 1)
contoursNum += 1
if contoursNum > 30 :
print('Approximately defect(s) detected')
else :
print('Unable to detect defects')
cv.imshow('canny2', img2)
cv.waitKey(0)
cv.destroyWindow('canny2')
daqipao_path = list(sorted(os.listdir('opencv_course_design_data/NG/daqipao/')))
jiaodai_path = list(sorted(os.listdir('opencv_course_design_data/NG/jiaodai/')))
OK_path = list(sorted(os.listdir('opencv_course_design_data/OK/')))
for path in daqipao_path :
RotImg1 = RotImg2 = Horizontal_correction('opencv_course_design_data/OK/OK_0032.bmp')
RotImg2 = Horizontal_correction(os.path.join('opencv_course_design_data/NG/daqipao', path))
imgAlignment1, imgAlignment2 = ImageAlignment(RotImg1, RotImg2)
Detect(imgAlignment1, imgAlignment2)
文章目录问题描述解决方法1 介绍2 方法2.1 产品水平矫正2.2 定位产品的外轮廓2.3 产品对齐2.4 缺陷检测3 实验结果及分析4 讨论问题描述如下图所示为某种用于试剂检验的产品,需要利用机器视觉的方法检测产品的缺陷。 本设计的目的是综合运用图像处理的知识,检测产品是否有严重缺陷。 在检测算法之前, 作为图像的预处理, 检测和定位产品的外轮廓,矫正产品的姿态,对于后续的算法处理有着重要的意义。数据为真实的工业产品成像,分为放在OK,NG目录下。数据提取地址链接 提取码:s3jl,OK目录下的
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达今天来一个缺陷检测的实例,如下是原图,第二个和第三个黑色部件有缺陷 思路: ①提取OK部件轮廓做model ②遍历部件轮廓,做差分,形态学处理 ③结果判断绘制 上代码(含注释):import cv2
import numpy as np
# 获取模板ROI
def get_templa...
这里写自定义目录标题欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入
欢迎使用Markdown编辑器
你好! 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Mar
一、用例介绍
该用例使用OpenVINO工具包包含的推理引擎,显示了如何在工业质量检验应用中利用分类网络的示例。该用例提供了一种支持人工智能的方法来将来自织物检查摄像机的输入帧分类为缺陷或良好。
二、安装环境
硬件要求: 英特尔处理器
系统要求: Ubuntu18.04 LTS
OpenVINO: 2021.2
python: 3.6
安装用时: 30min
三、工作原理
1.纺织品检验视频:
用于模拟纺织品检查摄像机的示例视频。该视频包括五种常见的纺织品缺陷,其中一些不容易被人眼注意到。
image = cv2.imread("111.bmp")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# blurred = cv2.GaussianBlur(gray, (5, 5), 0)
thresh = cv2.threshold(gray.
PCB是电子产品中十分常见的基础组件,其作为电路板的一种,负责连接各种电子元器件,具有十分重要的作用。然而,由于制造过程中的种种原因,PCB很可能会出现一些缺陷,如短路、开路、偏移等,这些问题都会对电路的正常运行产生不良影响。因此,PCB缺陷检测技术显得尤为重要。
在众多PCB检测技术中,基于OpenCV的检测技术是一个十分优秀的方法。OpenCV是一个基于C++编程语言的开源计算机视觉库,它能够支持很多常用的算法和模型,如图像处理、目标识别、运动跟踪等。而在PCB检测领域,OpenCV则提供了很多有力的工具和函数,如机器视觉、图像采集、图像预处理、缺陷检测等。
OpenCV在PCB缺陷检测中的应用过程大致如下:将PCB板放到图像处理系统中,用摄像头或者扫描仪采集图像,并且进行一系列处理和分析。主要的处理步骤包括:灰度化、二值化、形态学处理、轮廓提取、缺陷扫描等。最终将缺陷信息标记在图像上或生成报告,协助工作人员进行后续的操作。
相比较于传统的人工检测方式,OpenCV技术有许多优势,如速度快、准确度高、成本低等。同时,OpenCV还具有很好的可扩展性和可定制性,可以根据具体需求进行定制化的操作。可以预见,在未来的某个时候,OpenCV技术将会成为PCB缺陷检测领域中的标配。