


python+OpenCV 实时测量相机位姿(相机外参)

最近需要调节摄像头与地面的夹角,即需要 实时测量摄像头的位姿 ,上网找相关的资料但没有发现相关的代码,便集百家之长,自己整合出来了一个,特此感谢我所搜索到的对我有帮助的代码的博主.
文末贴有完整代码!!!
步骤分为:
- 相机标定(matlab或者python)得到相机内参。
- 给棋盘格的角点赋予三维坐标。
- 利用findChessboardCorners与cornerSubPix获取图像上的角点坐标。
- 利用solvePnP解算相机外参(旋转矩阵与平移矩阵)。
- 结合摄像头实时测量位姿。
相机标定
分享一个在线生成 标定 图案并能下载包含标定图案pdf文件的网址。
网址: Camera Calibration Pattern Generator
要注意的是matlab与opencv中的内参矩阵元素顺序不一致。
畸变参数也不同,opencv中:k1,k2,p1,p2,k3


本文相机标定的图片集
链接: https:// pan.baidu.com/s/1I9U_GT H75GQVE0Wsudx14A?pwd=vdkk
提取码:vdkk
# 内参数矩阵
Camera_intrinsic_8mm = {
"mtx": np.array([[1.33988831e+03, 0.00000000e+00, 6.51139957e+02],
[0.00000000e+00, 1.33659412e+03, 4.92876896e+02],
[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]],
dtype=np.double),
"dist": np.array([[-1.20912144e-01, 5.88024656e-02, -2.28958046e-04, -5.41222488e-04,
4.97592916e-01]], dtype=np.double),
}获取棋盘格世界三维坐标
# w h分别是棋盘格模板长边和短边规格(角点个数)
w = 10
h = 7
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵,认为在棋盘格这个平面上Z=0
objp = np.zeros((w * h, 3), np.float32) # 构造0矩阵,88行3列,用于存放角点的世界坐标
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2) # 三维网格坐标划分
worldpoint = objp * 20 # 棋盘格的宽度为15mm (array(70,3))获取图像上的角点坐标
类似于用opencv进行相机标定,检测棋盘格角点。
在这里贴一下python相机标定与畸变矫正的代码。
import cv2
import numpy as np
import glob
# 读取图像,解决imread不能读取中文路径的问题
def cv_imread(filePath):
cv_img = cv2.imdecode(np.fromfile
(filePath, dtype=np.uint8), -1)
# imdecode读取的是rgb,如果后续需要opencv处理的话,需要转换成bgr,转换后图片颜色会变化
# cv_img = cv2.cvtColor(cv_img, cv2.COLOR_RGB2BGR)
return cv_img
def calibration():
# 找棋盘格角点
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# print(cv2.TERM_CRITERIA_EPS,'',cv2.TERM_CRITERIA_MAX_ITER)
# w h分别是棋盘格模板长边和短边规格(角点个数)
w = 10
h = 7
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵,认为在棋盘格这个平面上Z=0
objp = np.zeros((w * h, 3), np.float32) # 构造0矩阵,88行3列,用于存放角点的世界坐标
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2) # 三维网格坐标划分
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
images = glob.glob('D:/OneDrive/OneDrive - mail.scut.edu.cn/volume/calibration/8mm/*.jpg')
for fname in images:
img = cv_imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 粗略找到棋盘格角点 这里找到的是这张图片中角点的亚像素点位置,共11×8 = 88个点,gray必须是8位灰度或者彩色图,(w,h)为角点规模
ret, corners = cv2.findChessboardCorners(gray, (w, h))
# 如果找到足够点对,将其存储起来
if ret == True:
# 精确找到角点坐标
corners = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
# 将正确的objp点放入objpoints中
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w, h), corners, ret)
cv2.imshow('findCorners', img)
cv2.waitKey()
cv2.destroyAllWindows()
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# 去畸变
img2 = cv2.imread('D:/OneDrive/OneDrive - mail.scut.edu.cn/volume/calibration/5mm/2023-03-13_09_17_14_069.jpg')
h, w = img2.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 0, (w, h)) # 自由比例参数
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# 根据前面ROI区域裁剪图片
# x,y,w,h = roi
# dst = dst[y:y+h, x:x+w]
# dst = cv2.resize(dst,(400,400))
cv2.imshow('fin', dst)
# end = time.time() - s
cv2.waitKey()
cv2.destroyAllWindows()
# 反投影误差
total_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2)
total_error += error
print("total error: ", total_error / len(objpoints))
# 打印我们要求的两个矩阵参数
print("newcameramtx内参:\n", newcameramtx)
print("dist畸变值:\n", dist)
print("newcameramtx旋转(向量)外参:\n", rvecs)
print("dist平移(向量)外参:\n", tvecs)
print("roi:", roi)
def Correct(img):
mtx = np.array([[1.34121216e+03, 0.00000000e+00, 6.49632172e+02],
[0.00000000e+00, 1.33802307e+03, 4.93509463e+02],
[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]]) # 内参
dist = np.array([-1.16174749e-01, 1.18791150e-02, -1.99795339e-04, -7.44955520e-04,
6.34923566e-01]) # 畸变参数--顺序很重要!!!:k1,k2,p1,p2,k3
img_distort = cv2.undistort(img, np.array(mtx), np.array(dist))
return img_distort
# 进行相机标定
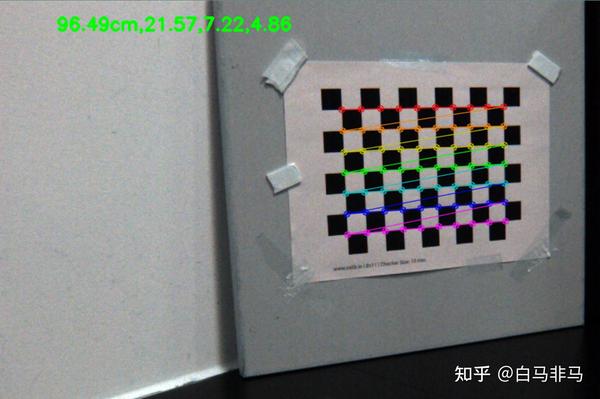
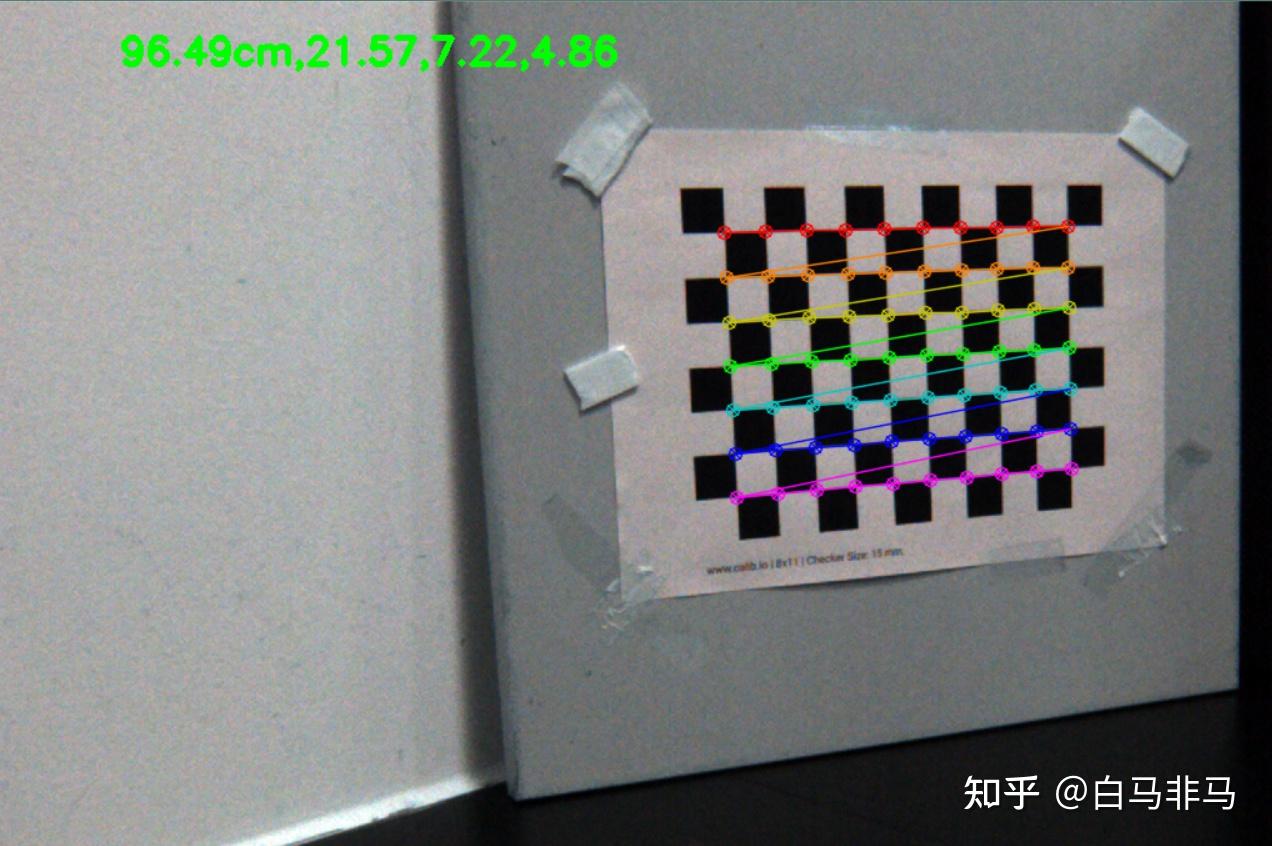
calibration()而在测位姿时,只需要检测角点即可。
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 粗略找到棋盘格角点 这里找到的是这张图片中角点的亚像素点位置,共11×8 = 88个点,gray必须是8位灰度或者彩色图,(w,h)为角点规模
ret, corners = cv2.findChessboardCorners(gray, (w, h))
# 如果找到足够点对,将其存储起来
if ret:
# 精确找到角点坐标
corners = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imagepoint = np.squeeze(corners) # 将corners降为二维solvePnP解算相机位姿(旋转矩阵与平移矩阵)
看其他求解位姿文章中,都是用四个角点来解算,但是opencv中的solvepnp支持4个以上的角点检测,就可以利用相机标定的角点检测函数,直接解算,比较方便。
(success, rvec, tvec) = cv2.solvePnP(worldpoint, imagepoint, Camera_intrinsic_5mm["mtx"], Camera_intrinsic_5mm["dist"])
distance = math.sqrt(tvec[0] ** 2 + tvec[1] ** 2 + tvec[
2] ** 2) / 10 # 测算距离
rvec_matrix = cv2.Rodrigues(rvec)[0]
proj_matrix = np.hstack((rvec_matrix, rvec))
eulerAngles = -cv2.decomposeProjectionMatrix(proj_matrix)[6] # 欧拉角
pitch, yaw, roll = eulerAngles[0], eulerAngles[1], eulerAngles[2]摄像头实时测量位姿
在这里贴上实时测量位姿的完整代码,由于用的工业相机不同(本文用的大恒),调用相机的函数也不一样,但本质就是输入一张图片而已,只需要更改摄像头的调用函数就可以直接使用。
import gxipy as gx
import cv2
import numpy as np
import math
# 内参数矩阵
Camera_intrinsic_8mm = {
"mtx": np.array([[1.33988831e+03, 0.00000000e+00, 6.51139957e+02],
[0.00000000e+00, 1.33659412e+03, 4.92876896e+02],
[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]],
dtype=np.double),
"dist": np.array([[-1.20912144e-01, 5.88024656e-02, -2.28958046e-04, -5.41222488e-04,
4.97592916e-01]], dtype=np.double),
Width_set = 1280 # 设置分辨率宽
Height_set = 960 # 设置分辨率高
framerate_set = 50 # 设置帧率
num = 100000 # 采集帧率次数
id = 0
device_manager = gx.DeviceManager() # 创建设备对象
dev_num, dev_info_list = device_manager.update_device_list() # 枚举设备,即枚举所有可用的设备
if dev_num == 0:
print("Number of enumerated devices is 0")
else:
print("")
print("**********************************************************")
print("创建设备成功,设备号为:%d" % dev_num)
cam = device_manager.open_device_by_sn(dev_info_list[id].get("sn"))
camera_id = dev_info_list[id].get("sn")
print("")
print("**********************************************************")
print("打开彩色摄像机成功,SN号为:%s" % camera_id)
cam.Width.set(Width_set)
cam.Height.set(Height_set)
# 设置连续采集
cam.TriggerMode.set(gx.GxSwitchEntry.OFF) # 设置触发模式
# cam.AcquisitionFrameRateMode.set(gx.GxSwitchEntry.ON)
# 设置帧率
cam.AcquisitionFrameRate.set(framerate_set)
print("")
print("**********************************************************")
print("用户设置的帧率为:%d fps" % framerate_set)
framerate_get = cam.CurrentAcquisitionFrameRate.get() # 获取当前采集的帧率
print("当前采集的帧率为:%d fps" % framerate_get)
cam.stream_on()
#这里是一下估测的核心代码
while True:
# 采集图像
raw_image = cam.data_stream[0].get_image() # 打开第0通道数据流
if raw_image is None:
print("获取彩色原始图像失败.")
img = raw_image.convert("RGB").get_numpy_array() # 从彩色原始图像获取RGB图像
# 找棋盘格角点
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# print(cv2.TERM_CRITERIA_EPS,'',cv2.TERM_CRITERIA_MAX_ITER)
# w h分别是棋盘格模板长边和短边规格(角点个数)
w = 10
h = 7
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵,认为在棋盘格这个平面上Z=0
objp = np.zeros((w * h, 3), np.float32) # 构造0矩阵,88行3列,用于存放角点的世界坐标
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2) # 三维网格坐标划分
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 粗略找到棋盘格角点 这里找到的是这张图片中角点的亚像素点位置,共11×8 = 88个点,gray必须是8位灰度或者彩色图,(w,h)为角点规模
ret, corners = cv2.findChessboardCorners(gray, (w, h))
# 如果找到足够点对,将其存储起来
if ret:
# 精确找到角点坐标
corners = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
worldpoint = objp * 20 # 棋盘格的宽度为20mm (array(70,3))
imagepoint = np.squeeze(corners) # 将corners降为二维
(success, rvec, tvec) = cv2.solvePnP(worldpoint, imagepoint, Camera_intrinsic_8mm["mtx"], Camera_intrinsic_8mm["dist"])
distance = math.sqrt(tvec[0] ** 2 + tvec[1] ** 2 + tvec[2] ** 2) / 10 # 测算距离
rvec_matrix = cv2.Rodrigues(rvec)[0]
proj_matrix = np.hstack((rvec_matrix, rvec))
eulerAngles = -cv2.decomposeProjectionMatrix(proj_matrix)[6] # 欧拉角
pitch, yaw, roll = eulerAngles[0], eulerAngles[1], eulerAngles[2]
# 显示参数文字
cv2.putText(img, "%.2fcm,%.2f,%.2f,%.2f" % (distance, yaw, -pitch, roll),
(100, 50), cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 255, 0), 3)