Adams导入外部数据

版本:Adams2020
Adams仿真过程中不可避免地需要使用外部数据辅助仿真,这里演示导入matlab规划好的数据作为Adams转动副驱动(Rotational Joint Motion)的驱动函数。
前期准备:
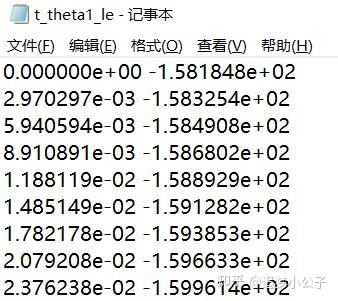
- 我在用matlab做四足机器人足端轨迹优化的时候,得到了一组腿部关节转动角度θ随时间t变化的数据。
- 然后将数据保存为.txt格式的文本文件,这里命名为t_theta1_le,第一列为时间t(s),第二列为关节转动角度θ(°)。
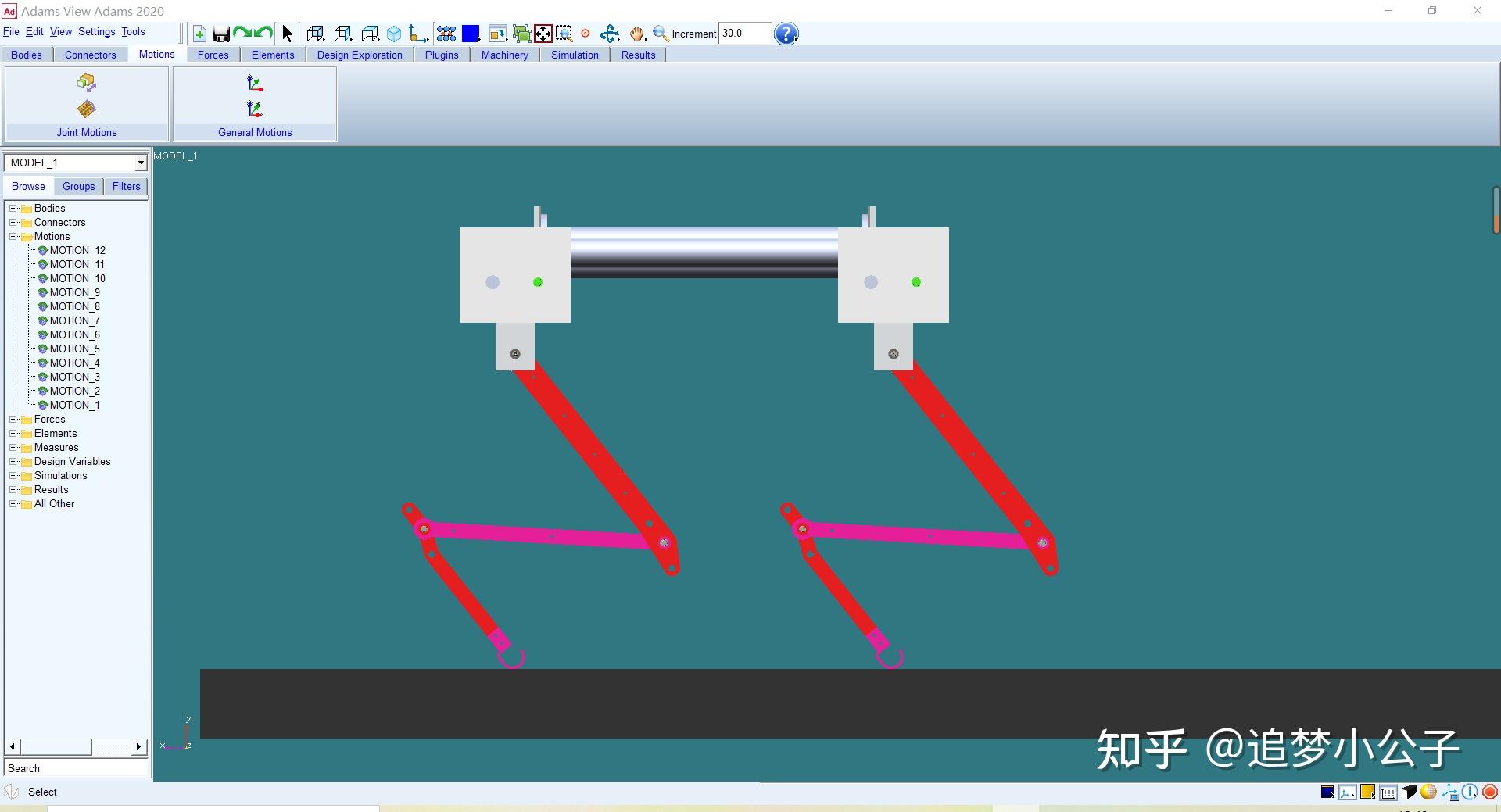
- 打开之前在Adams中建好的四足机器人虚拟样机模型。

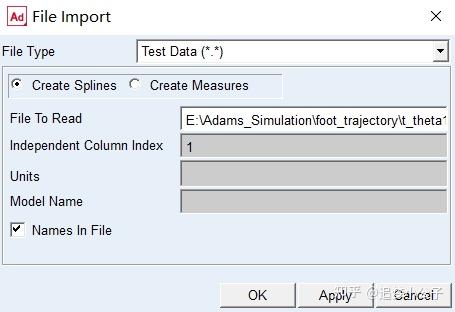
2. 点击菜单栏(界面左上角)的File--->Import,弹出文件导入(File Import)窗口,如下图。
- File Type选为Test Data(*.*),即外部输入数据;
- 选中Create Splines,即采用Splines函数对数据进行插值。
- 在File to Read一栏的空白条处右键,选Browse,选择之前保存的txt文件t_theta1_le,打开;
- Independent Column Index一栏的值设置为1,即数据的第一列时间t为自变量(横轴x),第二列关节转动角度θ为因变量(纵轴y);
- 单击OK。

3. 点击模型树(在界面左边)Browse一栏的Elements--->Data Elements,出现刚刚创建的SPLINE_1函数,如下图所示。

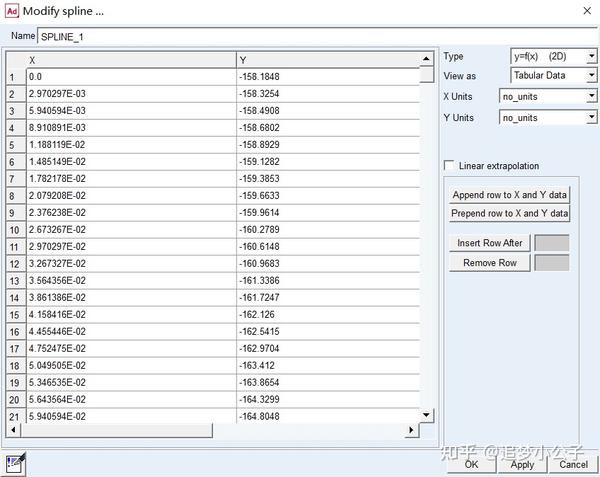
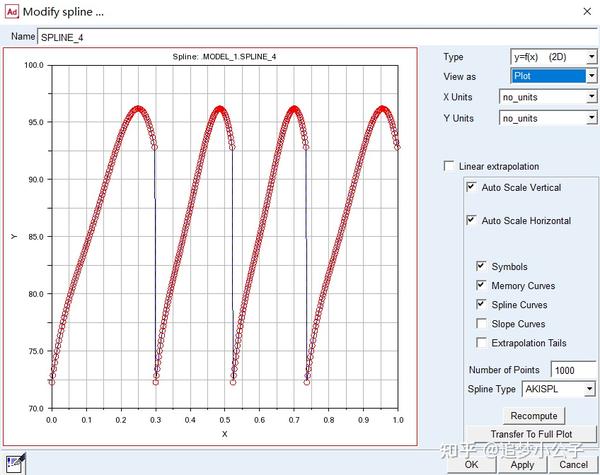
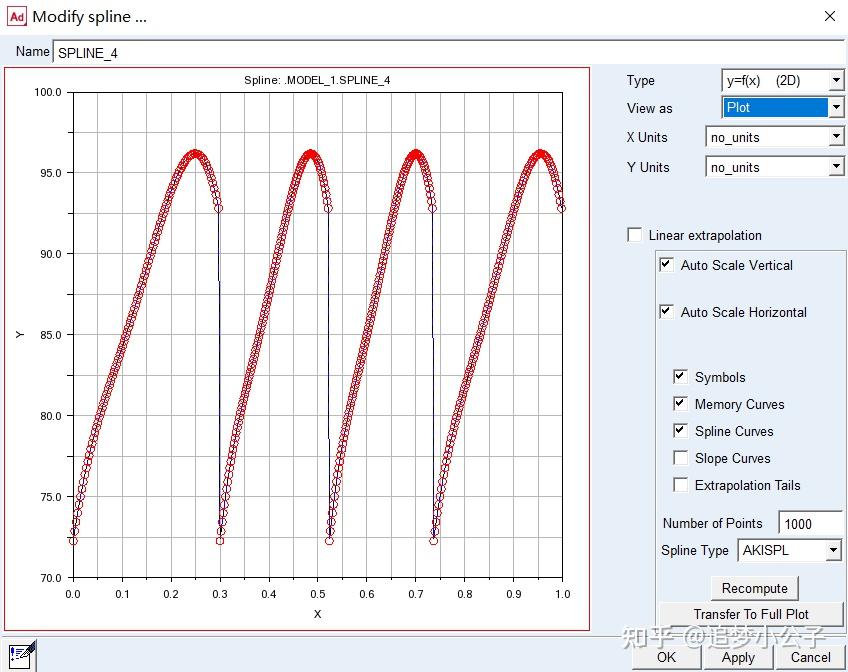
4. 双击SPLINE_1,弹出Modify spline窗口,如下图所示。可以在这里对数据进行调整,同时可以检查数据是否正确导入,可以看出X为时间t,Y为关节转动角度θ;点击右侧的View as,选择Plot,可以将Y关于X的函数画出来,这样更直观。
补充:这一步需在右侧X Units和Y Units处设置X、Y轴数据单位。

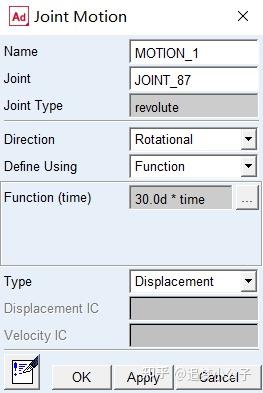
5. 双击需要添加外部函数作为驱动的MOTION,弹出Joint Motion窗口,如下图所示。单击Function (time)一栏右边···的小框框。
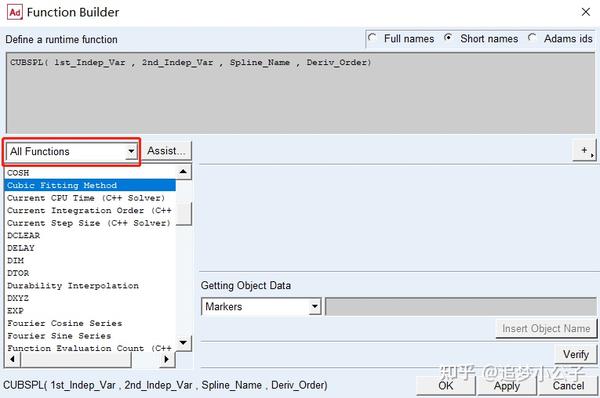
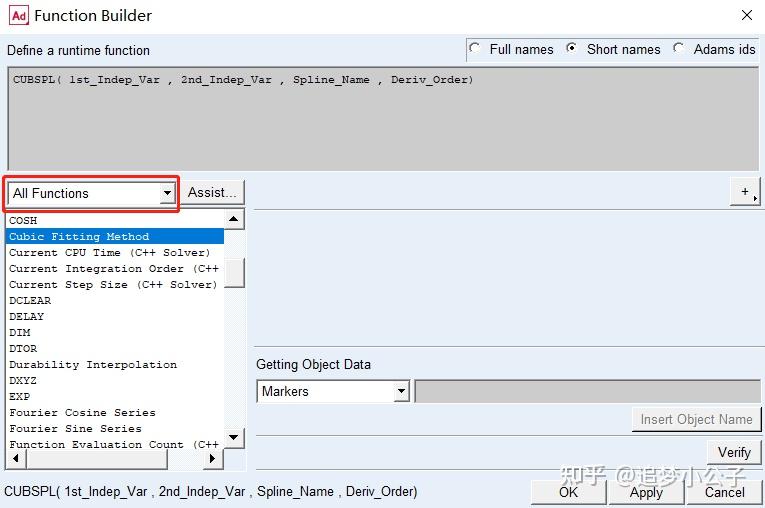
6. 弹出Function Builder窗口,将灰色图框中的原函数表达式删除,选择All Functions,找到Cubic Fitting Method,双击,结果如下图所示。
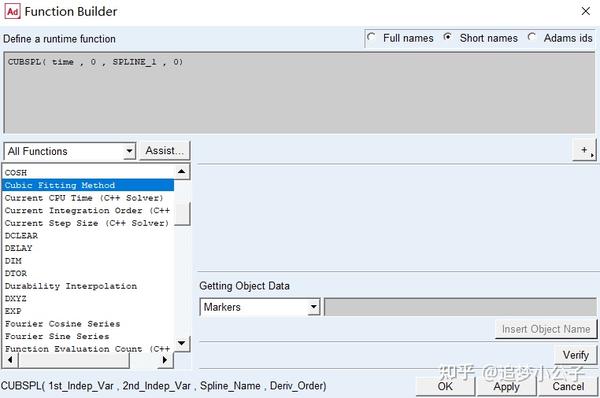
7. 修改CUBSPL的参数设置,结果如下图所示。
1st_Indep_Var(第一个独立变量):改为time,即第一个独立变量为时间;
2nd_Indep_Var(第二个独立变量):改为0,即无第二个独立变量;
Spline_Name(样条曲线名称):改为SPLINE_1,即采用从外部导入的样条函数SPLINE_1
Deriv_Order(衍生指令):改为0,即无。

8. 点击OK,再点击OK,进入模型仿真界面。
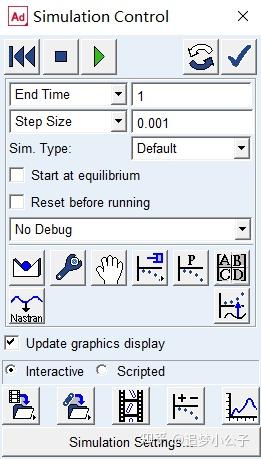
9. 打开仿真控制窗口,将仿真时间设置为与外部导入数据的时间相同,这里为1s。点击绿色按钮开始仿真。