边缘检测类似微分运算,本质是检测图像的亮度变化。因此,噪声必然会对图像检测结果带来影响。为了避免噪声对检测
算子的影响,在构造边缘检测
算子的时候不仅需要考虑
差分处理,害的考虑平滑处理,这样既能滤除噪声又能检测边缘。类似一阶
差分模板,Roberts交叉
算子只是考虑了
差分因素,而Prewitt他
算子通过对一阶
差分模板扩展成3*3的尺寸从而引入了均值运算。
Sobel算子被认为是较好的检测模板,它考虑
差分因素还兼顾了类似高斯平滑的平滑处理。
索贝尔算子(Sobeloperator)主要用于获得数字图像的一阶梯度,是一种离散性差分算子。它是prewitt算子的改进形式,改进之处在于sobel算子认为,邻域的像素对当前像素产生的影响不是等价的,所以距离不同的像素具有不同的权值,对算子结果产生的影响也不同。一般来说,距离越远,产生的影响越小。
图像处理中认为,灰度值变化剧烈的地方就是边缘。那么如何判断灰度值变化?如何度量“剧烈”?sobel算子就对这些问题做了自己的规范,而且命名为sobel算子,就是对一副图像的输入到输出边缘信息的整...
索贝尔算子(Sobeloperator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
Sobel卷积因子为:
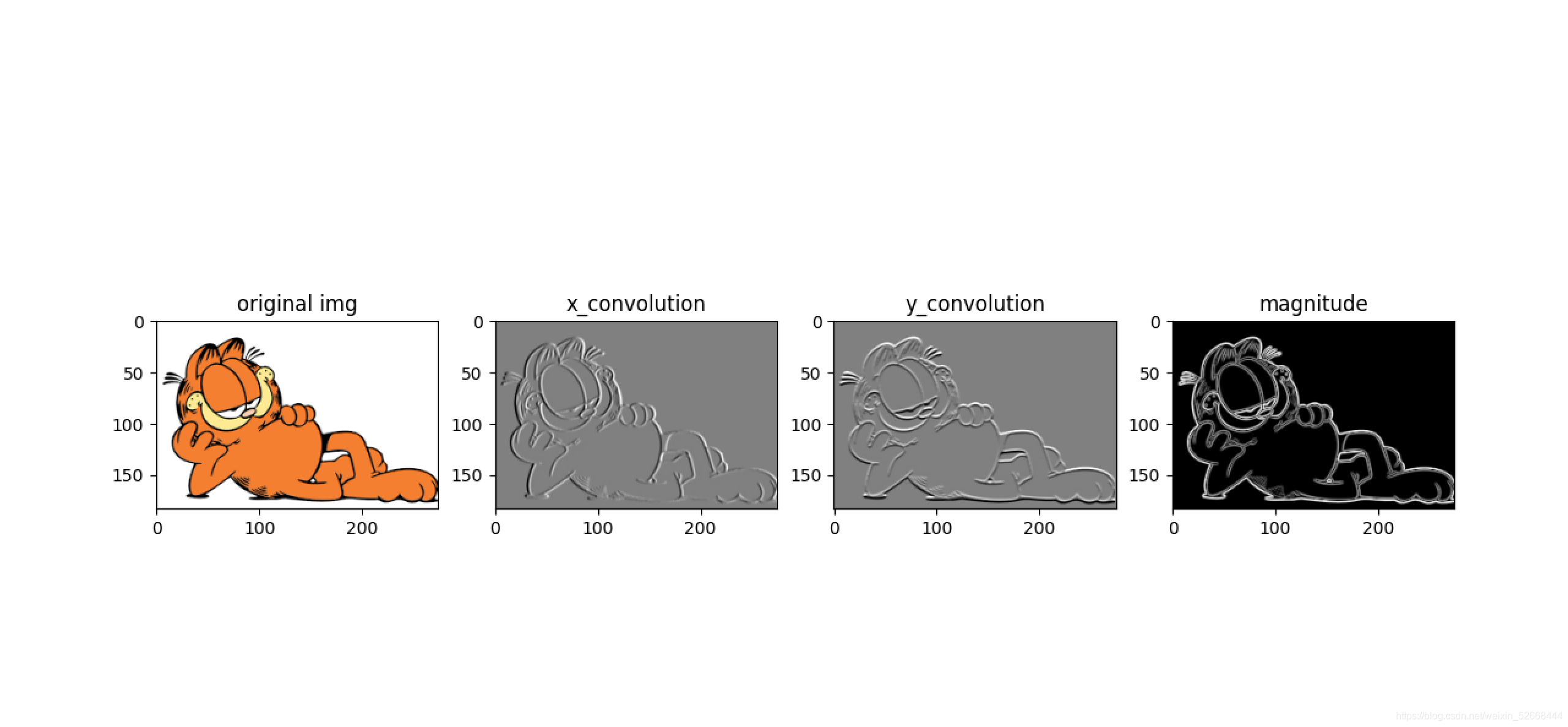
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度
拉普拉斯算子和索伯算子都是图像处理中常用的边缘检测算子,用于检测图像中的边缘和轮廓。
拉普拉斯算子是一种二阶微分算子,它可以通过计算图像中像素点周围像素值的二阶差分来检测边缘。拉普拉斯算子有不同的离散形式,其中最常用的是3x3的离散拉普拉斯算子,其模板如下:
| 0 1 0 |
| 1 -4 1 |
| 0 1 0 |
索伯算子是一种一阶微分算子,它可以通过计算图像中像素点周围像素值的一阶差分来检测边缘。索伯算子有水平和垂直两个方向,其中水平方向的索伯算子模板如下:
| -1 0 1 |
| -2 0 2 |
| -1 0 1 |
垂直方向的索伯算子模板如下:
| -1 -2 -1 |
| 0 0 0 |
| 1 2 1 |
在实际应用中,可以将水平和垂直方向的索伯算子组合起来,形成一个2x2的算子:
| -1 0 |
| 0 1 |
这个算子可以通过卷积运算来应用到图像上,以检测图像中的边缘。