


Graph Neural Network(GNN)综述

作者简介:
吴天龙 香侬科技researcher
作者公众号(suanfarensheng)
原创声明:本文为 SIGAI 原创文章,仅供个人学习使用,未经允许,不能用于商业目的。
其它机器学习、深度学习算法的全面系统讲解可以阅读 《机器学习-原理、算法与应用》 ,清华大学出版社, 雷明著 ,由SIGAI公众号作者倾力打造。
导言
图(graph)是一个非常常用的数据结构,现实世界中很多很多任务可以描述为图问题,比如社交网络,蛋白体结构,交通路网数据,以及很火的知识图谱等,甚至规则网格结构数据(如图像,视频等)也是图数据的一种特殊形式,因此图是一个很值得研究的领域。
针对graph的研究可以分为三类:
1. 经典的graph算法 ,如生成树算法,最短路径算法,复杂一点的二分图匹配,费用流问题等等;
2. 概率图模型 ,将条件概率表达为图结构,并进一步挖掘,典型的有条件随机场等
3. 图神经网络 ,研究图结构数据挖掘的问题,典型的有Graph Embedding,Graph CNN等。
本文主要针对图神经网络,介绍一些最近几年该领域的一些研究进展。由于应用很广泛(主要是社交网络发展和知识图谱的推动),以及受到深度学习在其他领域成功的启示,这个方向是目前机器学习领域最火的方向之一了,KDD2018中31篇tutorials里面有9篇是关于graph的,bestpaper也是关于graph的,论文名字叫做:adversarial attacks onclassification models for graphs. 可见学术界和工业界的热情。
本文首先介绍Graph Embedding,为结构化的graph生成分布式表示;然后介绍Graph Convolutional Network(图卷积),接着简单介绍基于图的序列建模,最后简要总结了下GNN在各个领域的一些应用。
Graph Embedding
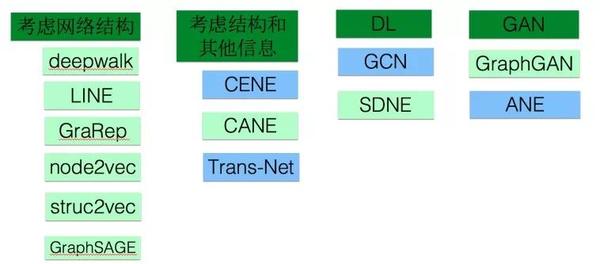
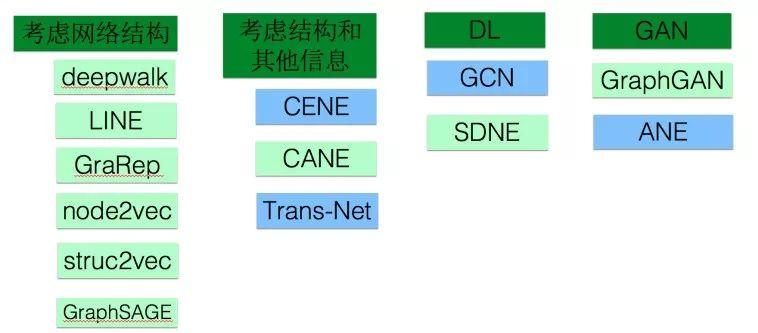
Graph embedding(GE)也叫做network embedding(NE)也叫做Graph representation learning(GRL),或者network representation learning(NRL),最近有篇文章把graph和network区分开来了,说graph一般表示抽象的图比如知识图谱,network表示实体构成的图例如社交网络, 我觉得有点过分区分了。图1.1是整个GE大家族,本文只介绍绿色的,蓝色模型就不一一介绍了。严格来说,图卷积也属于GE的一部分,由于目标不同以及其关注度较大,我们单独划分出来(文章第二部分)
WHAT & WHY
首先我们回答什么是embedding,以及为什么要做embedding。
WHAT?
- Embedding在数学上是一-个函数,f : X- > Y,即将一个空间的点映射到另一个空间,通常是从高维抽象的空间映射到低维具象的空间;
- 一般映射到低维空间的表示具有分布式稠密表示的特性;
WHY?
- 抽象的事物应该有一个低维的表示;比如我们看到一张含有一张小狗的图片,它底层的表示就是像素值。同样的我们看到"dog”这个单词时,它也应该有更低维的表示
- 计算机和神经网络善于处理低纬度信息
- 解决one-hot编码问题; one-hot编码是一 种特殊的高维到低维的映射,具有稀疏性,且向量长度较长并随着样本集变化而变化。one-hot编码是一种”讨巧”的编码方式,一般无法表示两个实体之间的相关性,embedding可以一定程度上解决这些问题。
Word2vec
Word2vec[2013]:Distributed Representations of Words and Phrases and their Compositionality
Word2vec是根据语料库中单词的共现关系求出每个单词的embedding。常用word2vec模型有cbow和skip-gram,cbow根据上下文预测中心词,skip-gram根据中心词预测上下文。由于两种模型相似,本节只介绍skip-gram模型。
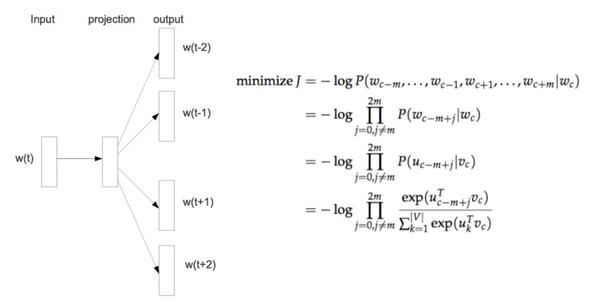
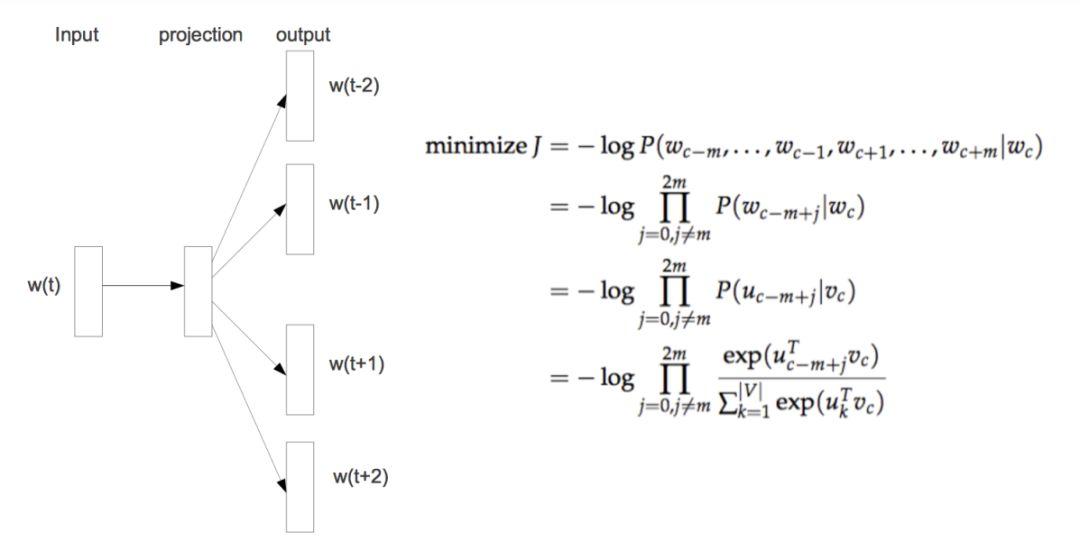
Word2vec本质是一个 输入不确定 的softmax回归。普通的softmax回归输入是确定的,我们需要求出参数矩阵,而word2vec中,输入的向量和参数矩阵都是不确定的,并且输入向量才是我们真正需要的,参数矩阵则是副产品。普通的softmax回归是一个凸优化问题,然后word2vec由于输入不确定不是一个凸优化问题,需要采取类似于坐标上升的优化方法。
由于以下两个原因:
1.一般来说语料库单词都是很多的,计算会非常长庞大。
2.正负样本极度不均衡。
一般不直接优化图1.1的表达式,有一些优化,比如分层softmax和负采样,一般来说现在最常用的是skip-gram+负采样。
这里提示一下,一般来说遇到配分函数的计算都需要优化,优化方法一般采 用噪声对比估计(Noise Contrastive Estimation, NCE),负采样(Negative Sampling)技术是NCE的一种特殊形式,后面我们会经常用到这个trick,负采样的一般表达式如公式1.1,其中 \tilde{p}(x) 是真实样本分布, U(x) 是某个”均匀”分布或者其他的、确定的、方便采样的分布,说白了, NCE的做法就是将它转化为二分类问题,将真实样本判为1,从另一个分布采样的样本判为0。 公式1.2是word2vec应用的负采样公式,即语料出现的Skip Gram视为正样本,随机采样的词作为负样本。关于NCE优化等价于直接优化softmax回归的数学证明详见“NCE等价于softmax回归的证明”
\mathbb{E}_{\boldsymbol{z} \sim \tilde{p}(\boldsymbol{x})} \log (\boldsymbol{p}(\mathbf{1} | \boldsymbol{x}))+\mathbb{E}_{\boldsymbol{z} \sim U(\boldsymbol{z})} \log (p(\mathbf{p} | \boldsymbol{x}))(1.1)
\mathbb{E}_{w_{j} \sim \tilde{p}\left(w_{j} | w_{i}\right)} \log \left(<u_{i}, v_{j}>\right)+\mathbb{E}_{x \tilde{p}\left(w_{j}\right)} \log \left(1-<u_{i}, v_{j}>\right)(1.2)
古典方法
在word2vec出现之前[2013],已经有一些方法试图对gragh进行embedding,这里简要介绍三个:
Locally Linear Embedding:
该方法假设一个节点可以用它邻居节点的线性组合表示,目标函数为:
\phi(Y)=\frac{1}{2} \sum_{i}\left|Y_{i}-\Sigma_{j} W_{i j} Y_{j}\right|^{2}
Laplacian Eigenmaps:
该方法认为在原始空间约相似的节点(使用边权衡量),映射到低维空间以后也会越相似。这里L是拉普拉斯矩阵,它是GCN的理论基石,非常重要。目标函数为:
\phi(Y)=\frac{1}{2} \sum_{i j}\left(Y_{i}-Y_{j}\right)^{2} W_{i j}
Graph Factorization:
该方法通过矩阵分解求得embedding表示,目标函数为:
\phi(Y, \lambda)=\frac{1}{2} \sum_{(i, j) \in E}\left(W_{i j}-<Y_{i}, Y_{j}>\right)^{2}+\frac{\lambda}{2} \sum_{i}\left\|Y_{i}\right\|^{2}
Deepwalk
Deepwalk[2014] : DeepWalk: online learning of social representations
思考一个问题,既然自然语言中的单词(word)可以通过共现关系进行embedding,那graph类似于 整个语料库,图中节点(node)类似于单词,我们可不可以通过node之间的共现关系对graph中的node进行embdding呢?答案的关键在于怎么描述node的共现关系。对于word2vec来说,语料库中每一个句子都可以描述单词之间的共现,那么我们可不可以构造一个类似于句子”的序列呢,把这些序列作为node的”句子”来得到其embedding呢?实际上,deepwalk的工作就是在graph. 上构造这些“句子”,然后直接使用word2vec模型训练得到graph中每个node的embedding表示!
Deepwalk是基础的network embedding算法,是将word2vec直接用于graph的算法,只是增加了随机游走以构造序列(类似于word2vec的语料库)。公式1.3 是random walk的公式,根据边权来完全随机的选择下一个节点,实际上 random walk是一种可回头的深度优先搜索 。
p\left(c_{i}=x | c_{i-1}=v\right)=\left\{\begin{array}{ll}{\frac{\pi_{\infty}}{Z},} & {\text { if }(v, x) \in E} \\ {0,} & {\text { otherwise }}\end{array}\right.(1.3)
LINE
LINE[2015] : Large scale information network embedding
作者认为高纬度相似的节点,映射到低维空间也应该是相似的。就两个节点的相似性,作者有两个维度的定义:
1st order proximity:在高维层次即原始图中,表示为节点之间的边权;在低位层次即两个向量要是比较近似的,用一个sigmoid函数表示。
2st order proximity:用于有向图,如果无向图可以变成有向图。在高维层次,表示为两个节点之间有多少公共一度节点;在低维层次表示为一个条件概率。
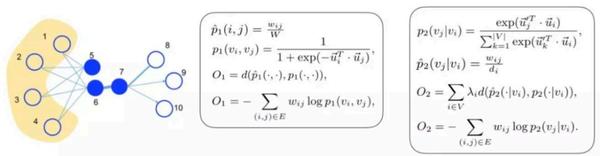
1st order proximity:直接相连的节点之间的相似度
2st order proximity:通过一阶公共节点传递的相似度,这个地方是比较迷惑人的,包括网上很多博客解释都是含糊不清或者是错的。其实最主要的是每个节点都有两个向量,一个是环境向量 (\vec{u}_{j}) ,一个是自身向量( \vec{u}_{j} )。环境向量处于被动地位,用于描述该节点充当context角色时的表示,自身向量即为最终embedding得到的向量,表示为条件概率可以理解为从节点 i 到节点 j 的概率,这表征着该节点作为环境时跟其它节点的关系。
需要注意的是1st order proximity和2nd order proximity是分别优化的,当然对于 p_{2}\left(v_{j} | v_{i}\right) 又是一个softmax,我们同样使用负采样优化技术:
\log \sigma\left(<\vec{u}_{j}^{\prime}, \vec{u}_{i}>\right)+\sum_{i=1}^{K} E_{\Psi_{n} \sim P_{n}(v)}\left[\log \sigma\left(-<\vec{u}_{j}^{\prime}, \vec{u}_{i}>\right]\right.(1.4)
最后注意一点, LINE基于邻域相似的假设,这其实是一种基于BFS方法。
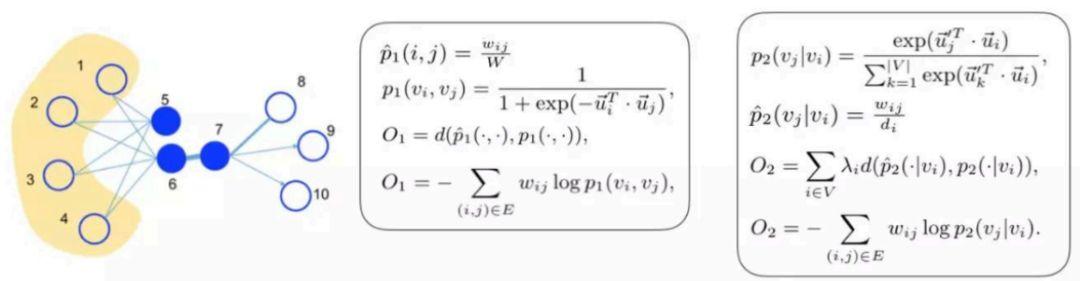
GraRep
GraRep[2015] : Learning Graph Representations with Global Structural
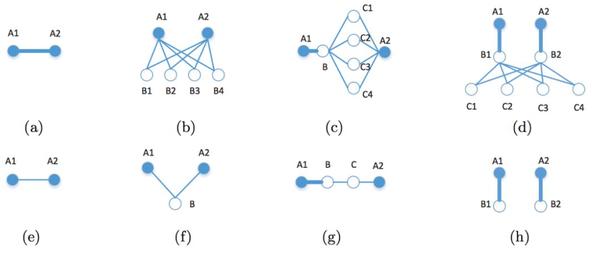
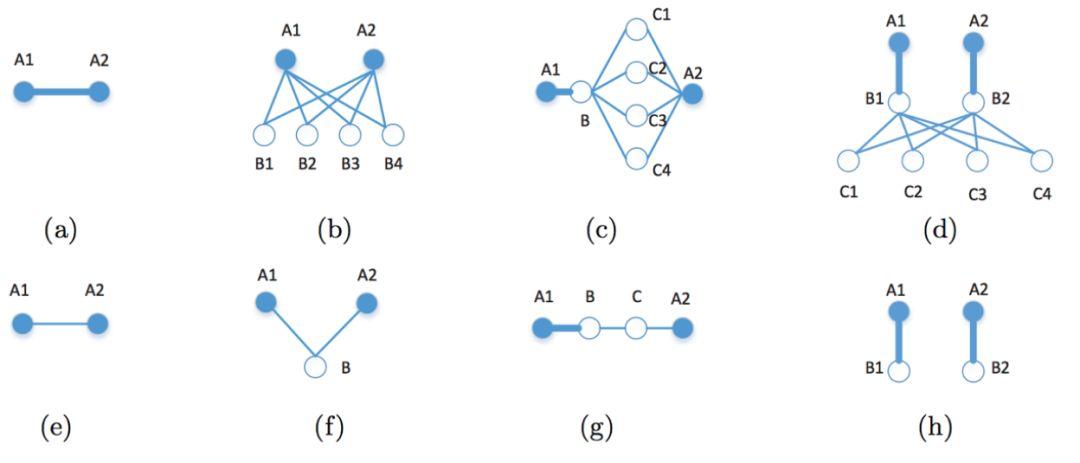
LINE只考虑2-order相似性好吗?为什么不考虑3-order, 4-ord.... 如图1 .4中,我们很明显知道上面一行A1与A2的关系强于下面一行,那么怎么描述这种关系呢? GraRep就是解决这个问题,和LINE思路一样,每个节点两个向量,一个自身向量,一个环境向量。
首先定义k—order相似性:
L_{k}=\sum_{w \in V} L_{k}(w)(1.5)
其中 L_{k}(w) 表示对于特定节点 w 的k-order相似性, L_{k}(w) 表示为公式1.6(已经使用了负采样优化):
L_{k}(w)=\left(\sum_{c \in V} p_{k}(c | w) \log \sigma(\vec{w} \cdot \vec{c})\right)+\lambda \mathbb{E}_{c^{\prime} \in p_{k}(V)}\left[\log \sigma\left(-\vec{w} \cdot \vec{c}^{\prime}\right)\right](1.6)
其中 p_{k}(c | w) 表示从 w 节点经过 k 跳以后到达 c 的概率,即 p_{k} 为节点 k 阶转移矩阵。一阶转移矩阵可以用归一化邻接矩阵 \boldsymbol{A}=\boldsymbol{D}^{-1} \boldsymbol{W} 表示,那么 k 阶转移矩阵为 P_{k}=A^{k} ,即
p_{k}(c | w)=A_{w, c}^{k}
p_{k}(c) 表示图中 k 跳的边缘分布,即随机选择开始位置,经过 k 跳以后到达 c 的概率:
p_{k}(c)=\sum_{\omega^{\prime}} q\left(w^{\prime}\right) p_{k}\left(c | w^{\prime}\right)=\frac{1}{N} \sum_{w^{\prime}} A_{w, c}^{k}(1.7)
其中 q\left(w^{\prime}\right) 表示 w^{\prime} 节点的先验分布,这里假设为均匀分布,即
\boldsymbol{q}\left(\boldsymbol{w}^{\prime}\right)=\frac{1}{N}
将1.6, 1.7代入并令导数为0,可以得到下式:
W_{i}^{k} \cdot C_{j}^{k}=\log \left(\frac{A_{i, j}^{k}}{\sum_{t} A_{t, j}^{k}}\right)-\log \left(\frac{\lambda}{N}\right)(1.8)
即求一个矩阵分解即可,丢弃 C 矩阵(环境向量组成的矩阵), W 矩阵即为所求。
Node2vec
Node2vec[2016] : Scalable Feature Learning for Networks
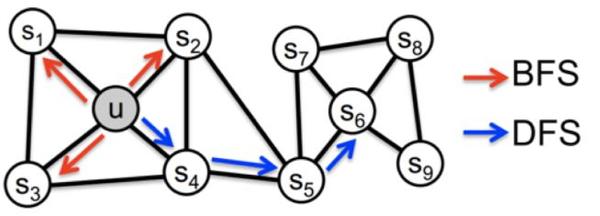
前面说到Deepwalk其实是基FDFS模型, LINE和GraRep是基于DFS的模型,一般来说基于BFS的模型倾向于获取图中的内容相似性(即局部相似性),基于DFS的夜型更倾向于获取结构相似性。那么能否设计一种可以平衡BFS和DFS的模型呢? Node2vec给出了一种方案,它设计了一个二阶随机游走,通过
p, q
两个参数来平衡BFS和DIS两种搜索策略。
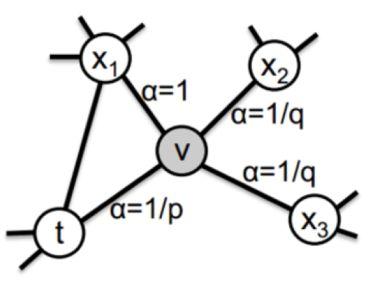
图1.6是 p, q 控制的二阶随机游走的示意图,其中 a 是关于当前节点 v 搜索下一个节点2的函数, p,q 为超参数,表达式如下:
\alpha(t, x)=\left\{\begin{array}{ll}{\frac{1}{p},} & {\text { ifd }_{t x}=0} \\ {1,} & {\text { ifd }_{t x}=1} \\ {\frac{1}{q},} & {i f d_{t x}=2}\end{array}\right.(1.9)
那么从当前节点 v 随机游走到下一个节点 x 的概率就是其归一化形式:
p(x | v)=\frac{\alpha(t, x)}{\sum_{(y, v) \in E} \alpha(t, y)}(1.10)
从公式1.9和1.10可以看出, p 控制着随机游走以多大的概率“回头”, q 控制着随机游走偏向于DFS还是BFS,当 q 较大时,倾向于BFS, 当 q 较小时: 倾向于DFS。 特别地,当 p, q 都为1时,等价于random walk。
node2vec在工业界也十分成功,有两个案列:
Facebook:广告领域定制化受众
Tencent:微信朋友圈广告(Lookalike)策略
Struc2vec
struc2vec[2017]:struc2vec:Learning Node Representations from Structural Identity
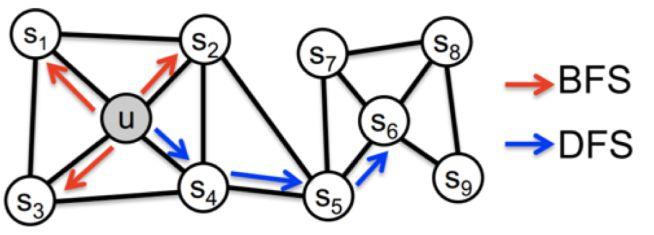
Struc2vec认为node的embedding不应该考虑任何相邻性,而是只考虑节点的空间结构相似性。它认为deepwalk和node2vec等模型之所以有效是因为,现实世界中相邻的节点往往有比较相似的空间环境,因此这种方法有效,但是有些时候这种方法会失效,例如图1.7。

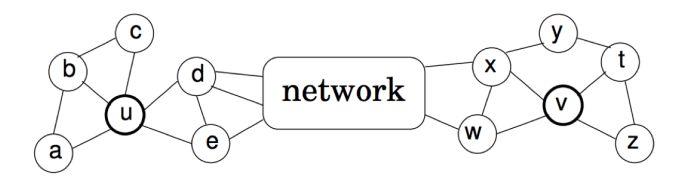
图1.7中,节点 u 和 v ,之间可能相隔很远,但是结构上他们却是十分相似的,GE算法应该考虑这种远距离的结构相似形。那么怎么用数学语言描述这种结构相似形呢? 一个直观的想法是,如果两个节点的所有邻居组成的两个序列相似,那么这两个节点就比较相似,实际上,论文正是使用这种方式分层定义结构相似形的。
考虑节点 u ,令 R_{k}(u) 表示与 u 最短距离为 k 的节点集合, s(S) 表示节 点集合 s \subset V 的有序度(degree)序列,定义 f_{k}(u, v)
f_{k}(u, v)=f_{k-1}(u, v)+g\left(s\left(R_{k}(u), s\left(R_{k}(v)\right)\right)\right)(1.11)
g 函数是比较两个序列相似度的函数,可以是Dynamic Time Warping(动态时间规整算法),用来计算两个可能长度不等的序列的相似 f_{k}(u, v) 表征节点 u, v 之间的结构不相似性,可以看出,随着 k 增大, f_{k}(u, v) 的感受野越来越大,因此我们需要先在底层 k = 1 比较节点之间相似性,如果两个节点之间关系较紧密,我们需要在更高层次(更大感受野)来度量两个节点的相似性,公式1.13反应出这一点(倾向于向上游走)。
利用 f_{k}(u, v) 构造分层图,同层之间节点之间的权值如公式1.12,相邻层对应节点的权值为公式1.13
w_{k}(u, v)=e^{-f_{k}(u, v)}(1.12)
\left\{\begin{array}{l}{w_{\left(u_{k}, u_{k+1}\right)}=\log \left(\Gamma_{k}(u)+e\right), \quad \Gamma_{k}(u)=\sum_{v \in V} 1\left(w_{k}(u, v)>\overline{w}_{k}\right)} \\ {w_{\left(u_{k}, u_{k-1}\right)}=1}\end{array}\right.(1.13)
接下来就是随机游走构建sequence了,首先每一步有一个概率 p 在本层, 1-p 跳出本层,如果在本层按照公式1.14采样下一个节点,如果跳出本层,按照公式1.15来选择上一层 \left(u_{k+1}\right) 还是下一层 \left(u_{k-1}\right) :
p_{k}(v | u)=\frac{e^{-f_{k}(u, v)}}{Z_{k}(u)}(1.14)
\left\{\begin{aligned} p_{k}\left(u_{k+1} | u_{k}\right) &=\frac{w_{( } u_{k}, u_{k+1} )}{w_{( } u_{k}, u_{k+1} )+w_{( } u_{k}, u_{k-1} )} \\ p_{k}\left(u_{k-1} | u_{k}\right) &=1-p_{k}\left(u_{k+1} | u_{k}\right) \end{aligned}\right.(1.15)
关于struc2vec有一个很成功的工业应用:蚂蚁金服风控模型。应用了struc2vec后,相比于node2vec有质变(AUC 70+ -> 90+)。
GraphSAGE
GraphSAGE[2017] : Inductive representation learning on large graphs
介绍一组概念:
-
直推式学习:直接根据graph学习到个N x F的矩阵,graph结构变化是要重新学习的
- 归纳式学习:利用节点邻域信息直接学习出新增节点(unseen node) 的embedding表示
前面介绍的模型全部都是直推式学习,换句话说当graph变化时,需要重新学习。GraphSAGE是归纳式学习的一个代表,它不直接学习每个节点的表示,而是学习聚合函数,学到了聚合函数以后,对于新增的节点我直接生成它的embedding表示,而不需要重头学习。下面算法就是GraphSAGE的核心内容了,图1.8更形象的表示这一算法。
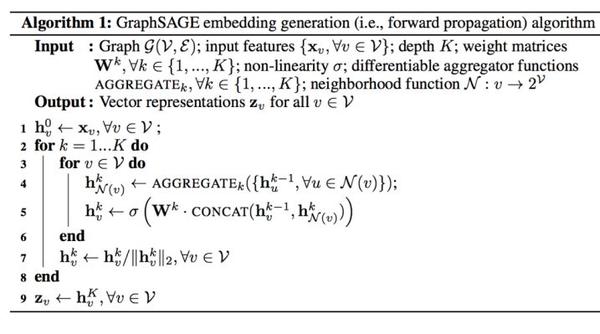
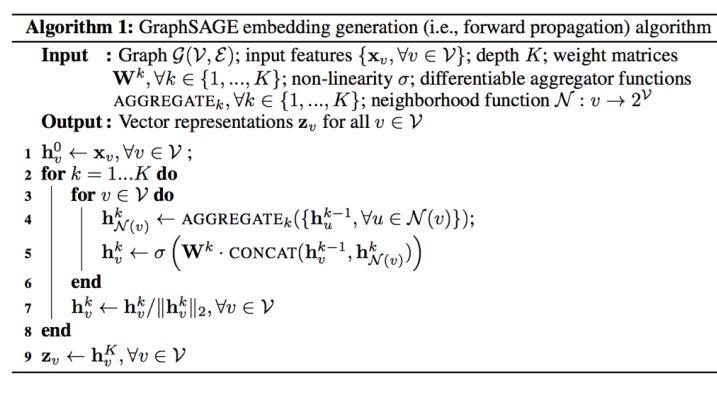
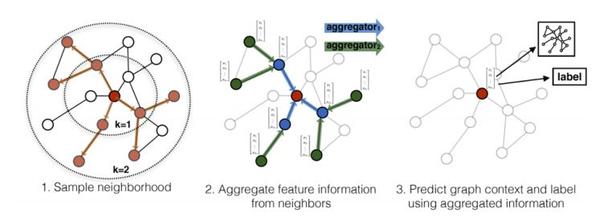
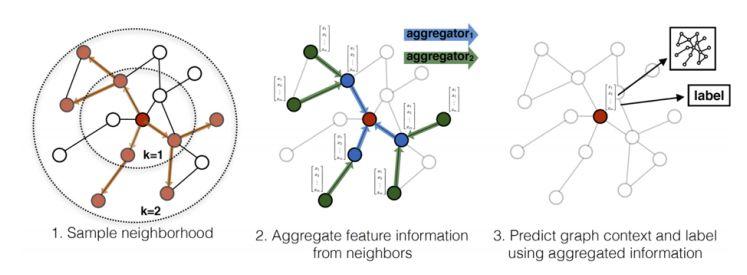
该算法分为两步:
1.邻居采样:因为每个节点的度是不一致的,为了计算高效,为每个节点分层(K层)采样固定数量的邻居。
2.邻居特征聚集:通过聚集采样到的邻居特征,更新当前节点的特征,网络第k层聚集到的邻居即为BFS过程第k层的邻居采样。
Aggregator function要求要对顺序不敏感,因为random选择的node本身是无序的,可以有如下几种选择,当然也可以自己设计:
- Mean aggregator: h_{v}^{k} \leftarrow \sigma\left(W . M E A N\left(\left\{h_{v}^{k-1}\right\} \cup\left\{h_{u}^{k-1}, \forall u \in \mathcal{N}(v)\right\}\right)\right)
- LSTM aggregator: LSTM输入是有序的,每次采样的node需要shuffle一下
- Pooling aggregator: Aggregator_{k}^{p o o l} \leftarrow \max \left(\left\{\sigma\left(W_{p o o l} h_{u_{i}}^{k}+b\right), \forall u_{i} \in \mathcal{N}(v)\right\}\right)
- GCN aggregator:图卷积聚合器,后文再表
CANE
CANE[2017] : Context-Aware Network Embedding for Relation Modeling
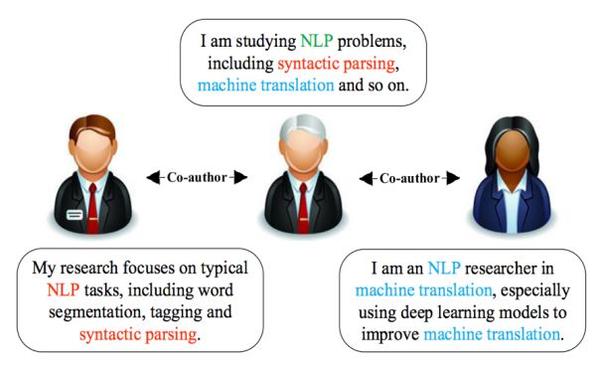
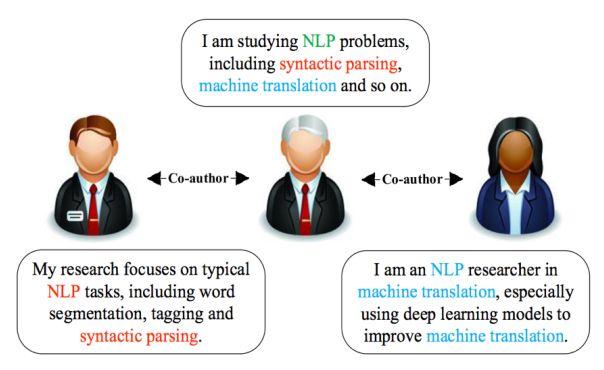
前面所有模型都是在图结构上做文章,但是现实世界中节点和边上有丰富的信息(如图1.9),包括我们组现在遇到问题(我们在对拼车的规模与成本之间关系建模),节点和边的信息都是不可忽略的。我们应该使用这些信息,由于graph embedding是伴随社交网络发展的,所以大多数文章把节点上的信息当做文本信息处理,类似的模型还有CENE,将文本转化为特殊的节点,这样就有两种连边,(节点-文档)以及(节点-节点),对两种边一起建模,trans-net将机器翻译的一些东西引进来,这些都是和nlp相关的,就不都说了,这里只简单介绍CANE,CANE兼顾结构相似性和文本内容相似性,应用attention机制, 可以自适应地计算文本之间的相似性。
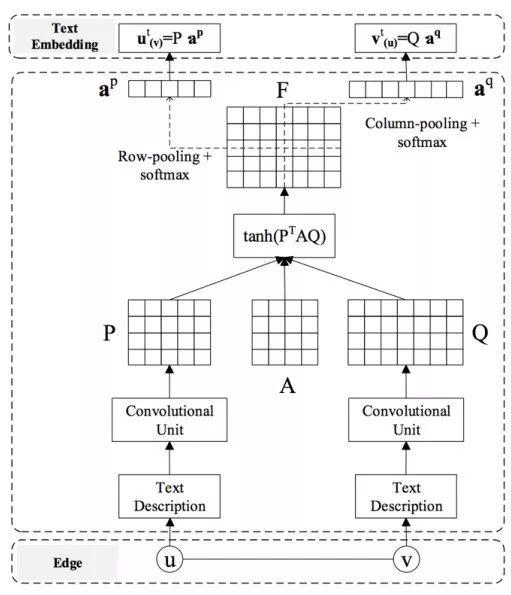
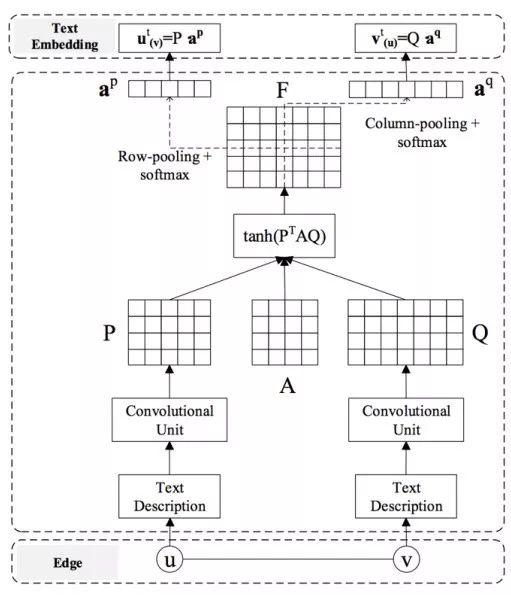
图1.9是CANE的框架示意图,从最底层看,使用训练好的词向量(就是一开始我们提到的word2vec)先把每个节点的文本信息表示为一个矩阵,然后使用行卷积变换;接着 P 和 Q 和一个Attention系数矩阵执行 \tanh \left(P^{T} A Q\right) 运算, \boldsymbol{F}_{i j} 表示着 P_{i} 对 Q_{j} 的重要程度,然后分别采用的row-pooling和column-pooling +softmax产生一个注意力向量,比如 a^{p} 就表示 v 对 P 每列的重要程度;最后使用注意力向量和原词向量矩阵相乘得到最终的 v 对 u 和 u 对 v 的text向量,分别表示为 v_{(u)}^{t} ,和 u_{(v)}^{t} 损失函数由两部分表示,一部分代表结构相似性 L_{s}(e) , 另一部分代表文本信息相关性 L_{t}(e) :
L(e)=L_{s}(e)+L_{t}(e) (1.16)
考虑结构相似性,和LINE相似:
p\left(v^{s} | u^{s}\right)=\frac{\exp \left(<u^{s}, v^{s}>\right)}{\sum_{z \in V} \exp \left(<u^{s}, v^{s}>\right)}(1.17)
L_{s}(e)=w_{u, v} \log p\left(v^{s} | u^{s}\right)(1.18)
文本相似性由三部分组成,分别为text-text相似性,text-structure相似性 和structure-text相似性:
L_{t}(e)=\alpha L_{t t}(e)+\beta L_{t s}(e)+\gamma L_{s t}(e)(1.19)
L_{t t}(e)=w_{u, v} \log p\left(v^{t} | u^{t}\right)(1.20)
L_{t s}(e)=w_{u, v} \log p\left(v^{t} | u^{s}\right)(1.21)
L_{s t}(e)=w_{u, v} \log p\left(v^{s} | u^{t}\right)(1.22)
当然,对于公式中所有的softmax,都需要使用负采样加速的。
SDNE
SDNE[2016]: Structural Deep Network Embedding
严格来说,前面所有模型都是浅层模型,SDNE是一个基于自编码器的深度模型,图1.11 是该模型的架构示意图
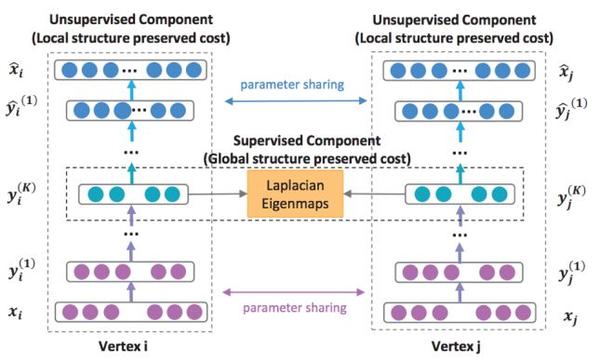
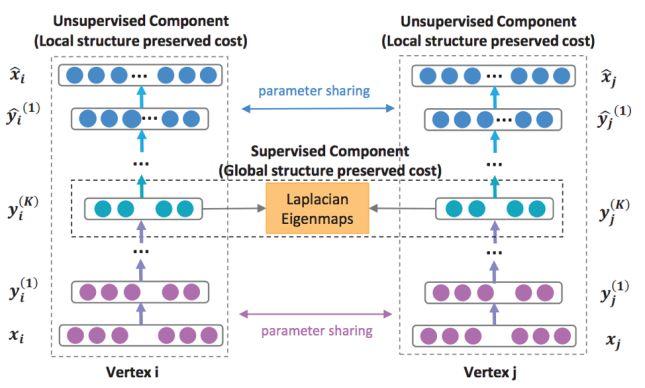
SDNE基于深度自编码器,它的输入是graph的邻接矩阵,每个node对应一行,该行表示该node与其他所有node是否有边。它的损失函数有两部分组成,第一部分是基于“如果两个node有边,那么他们应该是相似”的事实,第二部分是重建所示,公式如下:
\mathcal{L}_{m i x}=\mathcal{L}_{2 n d}+\alpha \mathcal{L}_{1 s t}+v \mathcal{L}_{r e g}(1.23)
注意 \mathcal{L}_{r e g} 是正则化项。 \mathcal{L}_{2 n d} 是重建损失,表达式为公式1.24:
\begin{aligned} \mathcal{L}_{2 n d} &=\sum_{i=1}^{n}\left\|\left(\hat{x}_{i}-x_{i}\right) \odot b_{i}\right\|_{2}^{2} \\ &=\|(\hat{X}-X) \odot B\|_{F}^{2} \end{aligned}(1.24)
这里面有一个小trick,就是公式里的 B ,它会增大对0的惩罚,即对于 xi=0, bi 较大, 对于 xi ≠0, bi 较小。这里是基于两个考虑:
- 一般来说邻接矩阵都比较稀疏,如果不对向量中的0做特殊惩罚,容易得到0向量的平凡解。
- 原始图中两个node之间没有边(邻接矩阵中对应值为0),并不代表他们真的没有关系,可能因为图不完整或者两个节点不是直接相连而是 K-hop 邻域( K > 1 )。 \mathcal{L}_{1 s t} 控制有边的两个node, embedding得到的向量接近,表达式为公式1.25:
\mathcal{L}_{2 n d}=\sum_{i, j}^{n} s_{i, j}\left\|\left(\hat{y}_{i}^{(K)}-y_{i}^{(K)}\right)\right\|_{2}^{2}(1.25)
其中 \boldsymbol{s}_{i, j} 表示两个节点的边权。
GraphGAN
GraphGAN[2018] : GraphGAN: Graph Representation Learning with Generative Adversarial Nets
如果评出最近两年最火的模型是什么?那么GAN一定在候选名单中,GAN和VAE是目前最优秀也是最经常拿来比较的两个深度生成模型,顺便提一句,最近有一篇paper: Variational Inference: A Unified Framework of Generative Models and Some Revelations将GAN和VAE统一到变分推断的框架下,作者大喊一句:你们别打了,都是自家兄弟,相煎何太急。
回归正题,最火的模型当然也要在最火的方向掺和一脚,这就是GraphGAN, 类似的模型还有ANE(Adversarial Network Embedding),这里只介绍GraphGAN。
GraphGAN思想是,生成器生成一条图中不存在的边,判别器判断一条边是否为图中存在的边,当训练完全以后,生成器生成的边和图中真实存在的边无法分辨,即embedding成功,换句话说 生成器逼近网络一阶信息 。
先看GraphGAN的目标函数:
\min _{\theta_{G}} \max _{\theta_{D}} V(G, D)=\sum_{c=1}^{V}\left(\mathbb{E}_{v \sim p_{\text {rrue}}}\left(\cdot | v_{c}\right)\left[\log D\left(v, v_{c} ; \theta_{D}\right)\right]\right)+\left(\mathbb{E}_{v \sim G\left(\cdot | v_{c} ; \theta_{G}\right)}\left[\log \left(1-D\left(v, v_{c} ; \theta_{D}\right)\right)\right]\right)(1.26)
公式1.26可以这样理解:
-
固定
\theta_{D}
看
\min _{\theta_{G}}
; 只有后面一项和
\theta_{G}
有关,最小化后面一项相当于最大化
D\left(v, v_{c} ; \theta_{D}\right)
,其中
v
是从
G\left(\cdot | v_{c} ; \theta_{G}\right)
采样的,换句话说
v
是生成器
G
生成的样本。也就是说
\min _{\theta_{G}}
的目的是让判别器
D
认为生成器
G
产生的样本为真,这是优化生成器。
- 固定 \theta_{G} 看 \max _{\theta_{D}} ;两项都和 \theta_{D} 有关,对于第一项,最大化第一项相当于最大化 D\left(v, v_{c} ; \theta_{D}\right) ,其中 v 是从 p_{\text {true}}\left( . | v_{c}\right) 采样的,换句话说是让判别器 D 认为真实的样本为真;对于第二项,最大化第二项相当于最小化 D\left(v, v_{c} ; \theta_{D}\right) ,其中 v 是从 G\left(\cdot | v_{c} ; \theta_{G}\right) 采样的,换句话说是让判别器 D 认为生成器 G 产生的样本为假。这是优化判别器。
所有的GAN的loss函数(最小最大游戏)都可以这么理解。现在看看生成器和判别器的形式:
D\left(v, v_{c}\right)=\sigma\left(d_{v}^{T} \cdot d_{v_{c}}\right)=\frac{1}{1+\exp \left(-d_{v}^{T} \cdot d_{v_{c}}\right)}(1.27)
G\left(v | v_{c}\right)=\frac{\exp \left(g_{v}^{T} \cdot g_{v_{c}}\right)}{\sum_{v \neq v_{c}} \exp \left(g_{v}^{T} \cdot g_{v_{c}}\right)}(1.28)
如上,判别器是一个sigmoid函数,生成器是一个softmax函数,实际上你可以设计任何合理的生成器与判别器。正如我们所见,式1.27是一个softmax, 我们需要优化它,论文中作者设计了一种叫做GraphSoftmax的优化方法,这里不详细介绍了,有兴趣的同学移步论文。
GraphWave
GraphWave[2018]: Learning Structural Node Embeddings via Diffusion Wavelets
模型特点:
完全非监督,不需要任何先验知识。 对比以往的模型,大多需要一些先验,比如struc2vec的先验是一个节点的局部性可以由其邻居的度序列表示(关于struc2vec,以及其他主流GE方法,这篇文章有详细介绍);然而GraphWave只需要输入拉普拉斯矩阵即可。
完整的数学证明——数学使人安心。 以前的方法都是启发式的,这篇论文作者使用大量篇幅证明使用GraphWave,结构等价/相似的节点具有近乎相同/相似的嵌入。在数学上的保证总能给人心安不是吗?
总结
前面说了很多GE的模型,从古典方法,到只考虑结构的模型,再到考虑节点和边extra info的模型,再到深度模型,大家可能觉得眼花缭乱,并不知道实际中应该用哪个模型。
这里我提示一句,你选择的模型一定要和你的实际问题相关:
- 比如如果你的问题更加关注内容相似性(局部邻域相似性)那么你可以选择node2vec, LINE, GraRep等;
- 如果你的问题更加关注结构相似性,你可以选择struc2vec, 这里可以简单说一下为什么 蚂蚁金服风控模型使用struc2vec相比node2vec有质的提升,这是因为在风控领域,你可信并不能代表你的邻居可信(有些“大V”节点邻居众多),但是一个直观的感觉是,如果两个人在图中处于相似的地位(比如两个“大V"),那么这两个人应该都可信或都不可信,并且-般来说这样的两个人(节 点)都相聚比较远;
- 再者如果你的模型需要考虑节点和边的额外信息,那么你可选择CANE, CENE, Trans-net等 ;
- 如果你想处理大规模易变图,你可以采用GraphSAGE, 或者先使用其他GE方法,再使用GraphSAGE归纳学习;
- 如果你想微调你的模型,你可选择GraphGAN;
- 甚至你可以选择很多GE方法,并将得到的embedding向量进行聚合,比如concat等方式;
总之, 选用什么模型取决你的问题!
图卷积(Graph CNN)
前面是GE领域的概述了,现在要说的是另一个事情就是图卷积(Graph Convolutional Neural Network,GCN),其实这相对于GE是另一个思路,GE基于高维相似性映射到低维以后也是相似的,我们想使用深度学习应该先学习图嵌入(借鉴nlp中的word2vec) ,而GCN就是直接端到端分类或回归,当然也可以先使用进行图嵌入,拿到嵌入向量以后进行gcn,另外gcn很多时候会附带的产生图嵌入。
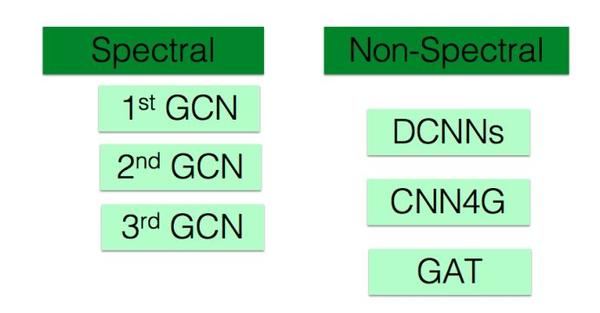
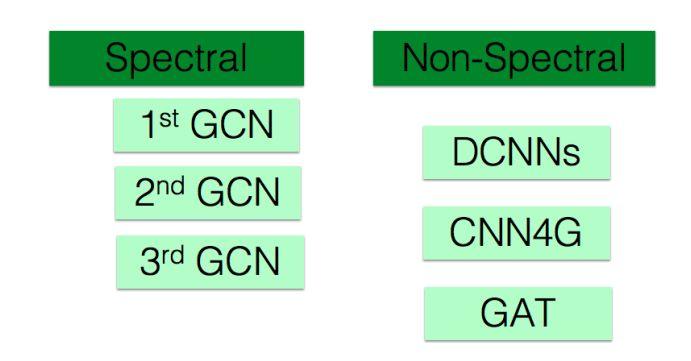
一般来说GCN分为两大类,一种是谱图卷积,是在傅里叶域进行卷积变换;另一种是非谱图卷积(也叫做“空间域卷积”),是直接在Graph上进行卷积。我们分别介绍这两类,图2.1 是GCN的大家族。
Spectral Convolution
谱图卷积需要补充一些理论知识。如果没有这些背景知识,你是看不懂GCN的,或者仅仅是一知半解,不会有深入的理解(关于这块的详细解释,见github原文)。
• Graph拉普拉斯算子
• Graph上的傅里叶(逆)变换
• Graph上的谱图卷积
1st Spectral Convolution: Spectral Networks and Locally Connected Networks on Graphs
Graph上的谱图卷积表达式为:
(f * h)_{G}=U\begin{pmatrix} \lambda_{1} & & & \\ & \lambda_{2} & & \\ & & ... & \\ & & & \lambda_{n} \end{pmatrix} U^{T} f(2.14)
写成矩阵形式为:
(f * h)_{G}=U\left(\left(U^{T} f\right) \odot\left(U^{T} h\right)\right)(2.15)
公式2.15是我们推导半天的最终成果了, U^{T} f 和 U^{T} h 分别为Graph原特征的傅里叶变换和卷积核的傅里叶变换,两者点乘,再左乘 U 即为原空间的卷积。
那么第一代谱图卷积就呼之欲出了,只需要把 \hat{h}\left(\lambda_{l}\right)
作为卷积核参数即可!表达式如下:
y_{\text {outppt}}=\sigma(U\begin{pmatrix} \theta_{1} & & & \\ & \theta_{2} & & \\ & &... & \\ & & & \theta_{n} \end{pmatrix}U^{T} x) (2.16)
大功告成!我们现在可以按照式2.16进行谱图卷积了。但是1st Spectral Convolution还有一些不完美的地方:
-
计算量大,每次卷积运算都要进行矩阵相乘,计算复杂度
O\left(N^{3}\right)
(即使使用优化的斯坦福算法复杂度也是
O\left(N^{2.37}\right)
,且需要特征分解,特征分解复杂度为
O\left(N^{3}\right)
,没有spatial localization(空间局部性),传统的CNN受控于感受野,每次卷积只需考虑一小部分邻域,但是GCN是每一次卷积都要考虑所有的节点。
- 参数个数 O\left(N\right) , 传统的CNN参数个数是常数,例如3*3的卷 积核有9个参数。
2nd Spectral Convolution
2nd Spectral Convolution[2016] : Convolutional neural networks on graphs with fast localized spectral filtering
1st Spectral Convolution有一些不完美的地方, 2nd Spectral Convolution就是解决这些问题的! 我们先把图卷积重写:
y=\sigma\left(U g_{\theta}(\Lambda) U^{T} x\right)(2.17)
其中 \Lambda 是特征值组成的对角矩阵,那么对于1st Spectral Convolution,
g_{\theta}(\Lambda)=\operatorname{diag}(\theta)(2.18)
对于2nd Spectral Convolution,把 g_{\theta}(\Lambda)
改为如下形式
g_{\theta}(\Lambda)=\sum_{k=0}^{K-1} \theta_{k} \Lambda^{k}(2.19)
我们把式2.19代入到2.17得到第二代卷积的公式:
\begin{aligned} y &=\sigma\left(U \sum_{k=0}^{K-1} \theta_{k} \Lambda^{k} U^{T} x\right) \\ &=\sigma\left(\sum_{k=0}^{K-1} \theta_{k} U \Lambda^{k} U^{T} x\right) \\ &=\sigma\left(\sum_{k=0}^{K-1} \theta_{k} L^{k} x\right) \end{aligned}(2.20)
式2.20推导过程中应用了特征分解的性质 U \Lambda^{k} U^{T}=L^{k}
公式2.20即为第二代卷积公式,当我们事先把 L^{k} 计算好,每一步只需要向量与矩阵相乘,复杂度降低为 O\left(K N^{2}\right) ,如果使用稀疏矩阵算法,复杂度为 O(K|E|) ,但是第二代卷积怎么体现spatial localization呢?
这里介绍一个拉普拉斯算子的性质:
Lemma2.1 :如果 d_{G}(m, n)>s ,则 L_{m, n}^{s}=0 , d_{G}(m, n)
表示图 G 中节点 m 和 n 的最短距离。
由Lemma 2.1可知,式2.20的卷积公式仅使用 K-hop 邻域,即感受野半径是 K 。
论文中提到另一种优化方式,将 L^{k} 利用切比雪夫展开来优化计算复杂度,优化后计算复杂度也为 O(K|E|) ,我本身没有看出有什么加速.
切比雪夫展开:任何k次多项式都可以使用切比雪夫多项式展开
切比雪夫展开公式为:
\begin{array}{l}{T_{0}(x)=1} \\ {T_{1}(x)=x} \\ {T_{k}(x)=2 x T_{k-1}(x)-T_{k-2}(x)}\end{array}(2.21)
将2.20中的 L^{k}
使用切比雪夫展开可得:
y==\sigma\left(\sum_{k=0}^{K-1} \theta_{k} T_{k}(\tilde{L})\right)(2.22)
其中 \tilde{L}=2 \frac{L}{\lambda_{\mathrm{ma}}}-I_{N}
,这是为了将L的谱半径约束到 [-1, 1] ,使得在连续相乘的时候不会爆炸。
总结2nd Spectral Convolution:
计算复杂度降低为
O(K|E)
只考虑
K-hop
邻域,有一定的空间局部性
3rd Spectral Convolution[2017] : Semi-supervised classification with graph convolutional networks
到第二代,谱图卷积已经基本成型,第三代GCN改动不大了,概括两个点:
1.令K=1,即每层卷积只考虑直接邻域,这类似于CNN中3*3的kernel。
2.深度加深,宽度减小(深度学习的经验,深度>宽度)。
总结2nd Spectral Convolution:
- 计算复杂度降低为 O(|E|)
- 只考虑 1 - hop 邻域,通过堆叠多层,获得更大的感受野
Spatial Convolution
前面讲的都是基于谱图理论的卷积,思想是在原空间卷积不好做,那就在图拉普拉斯算子的傅里叶域做。那么是否可以直接在原空间做卷积呢?答案是可以的,Spatial Convolution(空间域卷积)就是直接在图上做卷积,我们知道卷积核大小是固定的,也就是我们需要选择固定大小的邻域来做卷积,但是相比于规则网格结构,graph中的节点通常具有不同个数的邻域,这是在原空间做卷积的主要困难。
DCNNs[2016] : Diffusion-convolutional neural networks
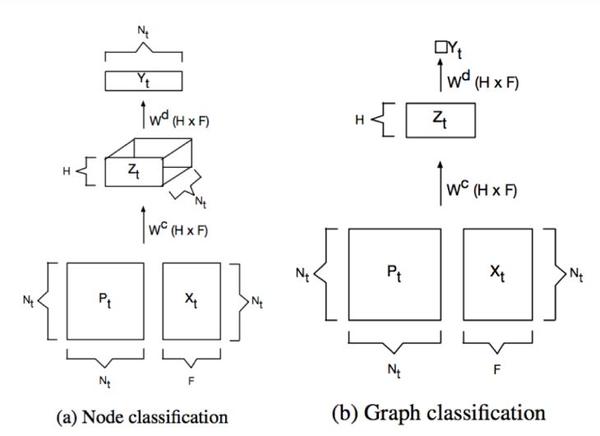
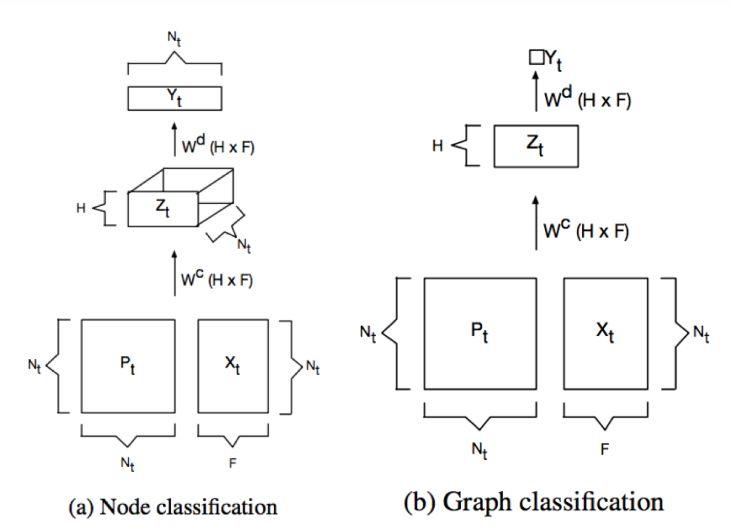
DCNNs可以应用于两种任务,一个是节点分类,一个Graph分类, 我们先说节点分类任务。对于节点分类任务,卷积公式为:
Z_{t i j k}=f\left(W_{j k}^{c} \cdot \sum_{l=1}^{N_{t}} P_{t i j l}^{*} X_{t l k}\right)(2.27)
其中 X_{t l k} 表示第t个Graph G_{t} , 第 l 节点的第 k 个特征; P_{t i j l}^{*} 表示 G_{t} 的 i 节点经过 j 跳以后达到 l 节点的概率, P_{t i j l}^{*}=P_{t i k}^{j} , P_{t} 为 G_{t} 的转移矩阵, P_{t}^{j} 为 G_{t} 的 j 跳转移矩阵, f 为非线性激活函数; W^{c} 为卷积核。将式2.27表达为 张量 形式为:
Z_{t}=f\left(W^{c} \odot P_{t}^{*} X_{t}\right)(2.28)
对于Graph分类任务,对于 G_{t} 上的每个节点 i ,取 H 跳的所有邻居的第 F 个特征求均值,乘以权值 W^{\mathrm{c}} 即可,表达式如下:
Z_{t}=f\left(W^{c} \odot 1_{N_{t}}^{T} P_{t}^{*} X_{t} / N_{t}\right)(2.29)
得到 Z 以后,按照图2.2架构网络即可。
DCNNS总结:
●卷积核参数 O(H*F)
●考虑 H 跳邻域
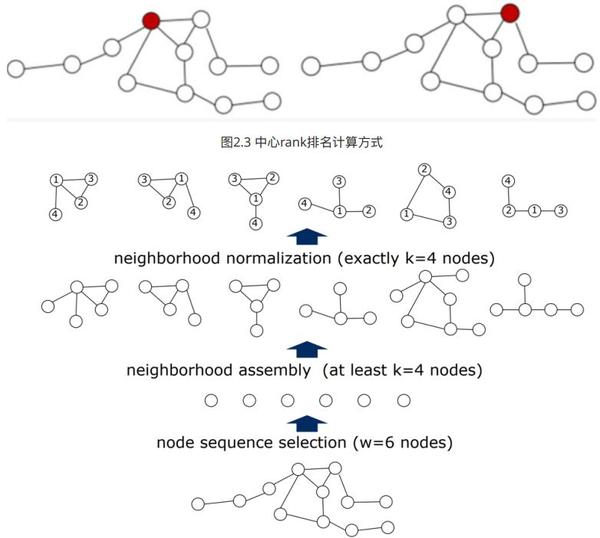
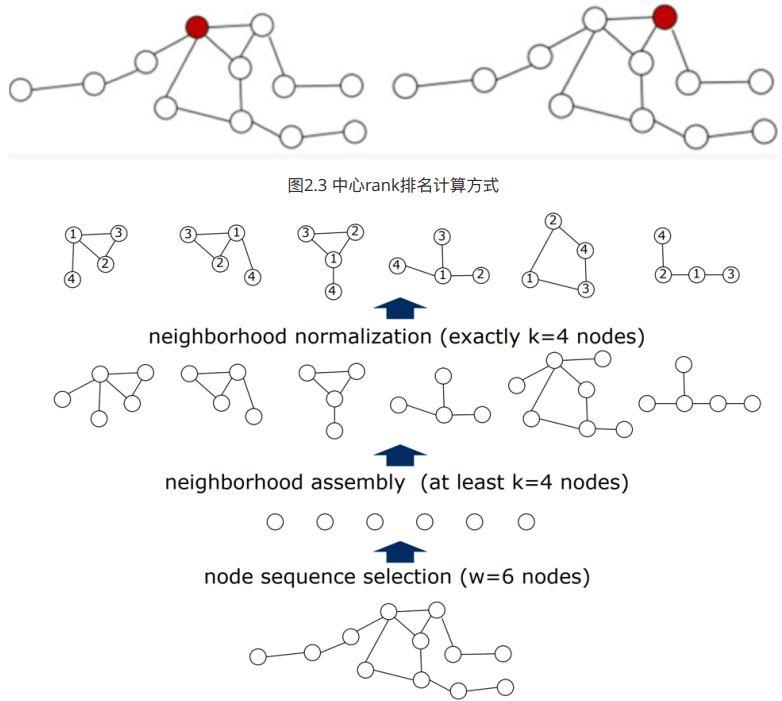
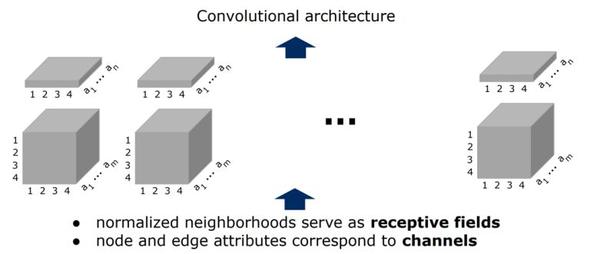
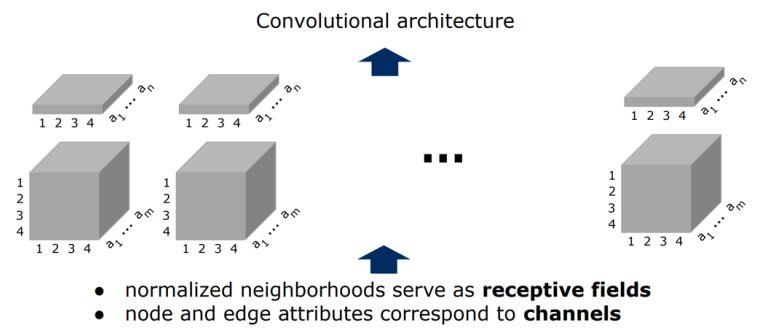
CNN4G[2016] : Learning convolutional neural networks for graphs
该模型是针对Graph分类任务的,主要思路是选出一-些节点代表整个Graph,并为每个节点选出特定个数的邻域,然后在每个节点和其邻域节点组成的矩阵上做卷积。
算法步骤:
- 找出 w 个节点,这 w 个节点可以代表整个Graph,文章使用的是centrality的方法,即选出 w 个最中心的节点。具体的计算该node与所有node距离和,距离和越小越中心,如图2.3中,左边红色节点与其他所有节点距离和为23,右边红色节点为25,所以左边红色节点更中心,应该优先选它。
-
为每个节点找出
K
个邻域,作为该节点的感受野,如图2.4
2.1先选出一阶邻域,一 阶邻域不够就选-二阶邻域,直到至少 K 个节点,或者没有节点可选.
2.2选出的节点如果不够,补充0向量,如果多了就按照中心rank排名删除后面的节点. -
选出的
w
个节点,每个节点和其邻域节点都可以组成规则的
(K + 1) * F
的矩阵,而所有的边也可以组成-个
(K +1)*(K + 1)* F
的张量,在这些张量上做卷积,如图2.5。
GAT[2018] : Graph Attention Networks
该模型结合了注意力机制,可以动态计算节点之间的相关性,并且该模型可以直推式学习,也可以归纳式学习,是非谱图卷积领域里state-of-the-art的方法,在很多公开数据集取得了非常好的效果。
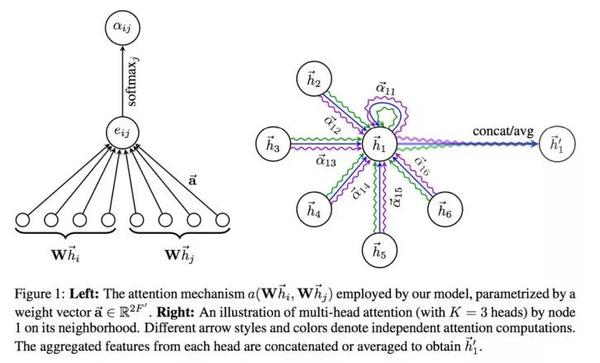
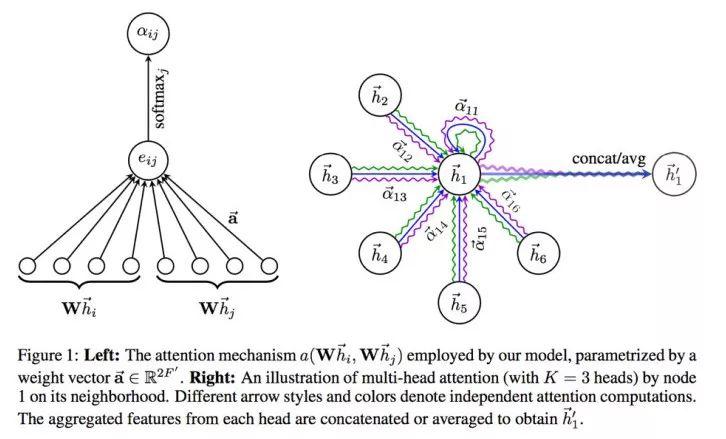
这个模型最最重要的就是attention,即动态计算邻域节点和该节点的强度关系,我们将看到只要用到attention的思路都是一样的, 论文Attention is all you need总结的很精准。
GATs的输入是节点特征的集合
\mathbf{h}=\left\{\vec{h}_{1}, \vec{h}_{2}, \ldots, \vec{h}_{N}\right\}, \vec{h}_{i} \in \mathbb{R}^{F}
其输出是经过变换后的节点特征集合
\mathbf{h}^{\prime}=\left\{\vec{h}_{1}^{\prime}, \vec{h}_{2}^{\prime}, \ldots, \vec{h}_{N}^{\prime}\right\}, \vec{h}_{i}^{\prime} \in \mathbb{R}^{F^{\prime}}
注意力系数计算如下:
e_{i j}=a\left(W \vec{h}_{i}, W \vec{h}_{j}\right)(2.30)
其中 a 表示注意力机制函数, 将上式归一化得到:
\alpha_{i j}=\operatorname{softmax}\left(e_{i j}\right)=\frac{\exp \left(e_{i j}\right)}{\sum_{k \in N_{i}} \exp \left(e_{i k}\right)}(2.31)
其中 \mathcal{N}_{i} 表示节点 i 的邻域节点集合。
将注意力机制函数用单独一层神经网络来表示,参数为
\vec{a} \in \mathbb{R}^{2 F^{\prime}}
,则式2.31可写为:
\alpha_{i j}=\frac{\exp \left(\vec{a}^{T}\left[W \vec{h}_{i} \| W \vec{h}_{j}\right]\right)}{\sum_{k \in N_{i}} \exp \left(\vec{a}^{T}\left[W \vec{h}_{i} \| W \vec{h}_{j}\right]\right)}(2.32)
其中||表示concat运算。一旦得到注意力系数,则输出即为变换后的特征与注意力系数的线性组合:
\vec{h}_{i}^{\prime}=\sigma\left(\sum_{k \in N_{i}} \alpha_{i j} W \vec{h}_{j}\right)(2.33)
如图2.6所示,我们可以设计
K
注意力系数,并将它们的结果聚合起来,聚合函数可以选择concat或者avg
\begin{aligned} \vec{h}_{i}^{\prime} &=\left\|_{k=1}^{K} \sigma\left(\sum_{k \in \mathcal{N}_{i}} \alpha_{i j}^{k} W^{k} \vec{h}_{j}\right)\right.\\ \vec{h}_{i}^{\prime} &=\sigma\left(\frac{1}{K} \sum_{k=1}^{K} \sum_{k \in \mathcal{N}_{i}} \alpha_{i j}^{k} W^{k} \vec{h}_{j}\right) \end{aligned}(2.34)
我们可以用多个GAT layer嵌套起来,已获得更大感受野。
总结
一般来说GCN分为两大类,一种是谱图卷积,是在傅里叶域进行卷积变换;另一种是非谱图卷积(也叫做“空间域卷积"),是直接在Graph.上进行卷积。谱图卷积有一套统一的理论支持,但是有时候会受到图拉普拉斯算子的限制;空间域卷积更加灵活,主要困难在于选择定量邻域上,很多模型千奇百怪,没有统一理论,更多是一种trick。
基于图的序列建模
接着一块说说图序列建模吧,这类问题相对较少,比较典型的例子是交通路网数据,短期内路网结构可以认为是不变的,但是里面的数据是流动的,换句话说graph是固定的,但是里面的数据是时间序列的,类比于视频预测一样,预测接下来一段时间,图中数据的变化,例子路网eta,路网流量预测等问题。
先简单说一下ConLSTM的思路,假设我想做视频预测的任务,那么我需要获取每一帧图像的空间(欧几里得空间)信息,同时视频的连续帧之间具有时间相关性,也就是说我需要同时获取空间和时间相关性。但是传统的LSTM输入是一维向量,如果我将视频每一帧图像展开为-维向量,那么将失去他们的空间信息。如果我可以让LSTM可以处理输入为二维的图像,那该多好啊,我们就可以同时获取其空间和时间信息,这就是ConvL STM解决的问题。简单来说ConvLSTM将LSTM中所有的矩阵相乘运算换为卷积网络,详细内容大家可以参看论文ConvolutionalLSTMNetwork:A.Machine Learning Approach for PrecipitationNowcasting。
DCRNNS
DCRNNs[2018]:DiffusionConvolutional Recurrent NeuralNetwork: Data-Driven Traffic Forecasting
Graph上的时间序列建模问题可以描述为:
\left[X^{\left(t-T^{\prime}+1\right)}, \ldots, X^{(t) } ; \mathcal{G} \right] \rightarrow h( .) \rightarrow\left[X^{(t+1)}, \ldots, X^{( t+T)} \right](3.1)
即Graph固定下,根据前一段序列预测后一段序列,是一个seq2seq问题。
有了ConvLSTM的思路,我们很自然可以想到,将GCN和RNN结合起来,改造出新的适合处理Graph输的RNN模型即可,DCRNNs就是将DCNNs和GRU结合起来的例子,为了可以抓取上游和下游的信息,作者对DCNNs增加了双向扩散,双向扩散卷积公式如下:
X_{ :, p} \star g f_{\theta}=\sum_{k=0}^{K-1}\left(\theta_{k, 1}\left(D_{o}^{-1} W^{T}\right)^{k}+\theta_{k, 2}\left(D_{I}^{-1} W^{T}\right)^{k}\right)(3.2)
其中 Do 和 Di 分别表示出度矩阵和入度矩阵,式3.2计算的是第 p 的特征(通道)的卷积公式,对于有 Q 个卷积核的卷积运算表达式如下:
H_{ :, q}=a(\sum_{p=1}^{P} X_{ :, p} \star_{\mathcal{G}}.f_{\Theta_{q, p, :, :}} )(3.3)
其中 q=1,2,…Q ,那么将式3.3应用到GRU中,可以得到DCGRU表达式:
\begin{aligned} r^{(t)} &=\sigma\left(\Theta_{r} \star_{\mathcal{G}}\left[X^{(t)}, H^{(t-1)}\right]+b_{r}\right) \\ u^{(t)} &=\sigma\left(\Theta_{u} \star g\left[X^{(t)}, H^{(t-1)}\right]+b_{u}\right) \\ \mathcal{C}^{(t)} &=\tanh \left(\Theta_{c} \star g\left[X^{(t)},\left(r^{(t)} \odot H^{(t-1)}\right)\right]+b c\right) \\ \mathcal{H}^{(t)} &=u^{(t)} \odot \mathcal{H}^{t-1}+\left(1-u^{(t)}\right) \odot \mathcal{C}^{(t)} \end{aligned}(3.4)
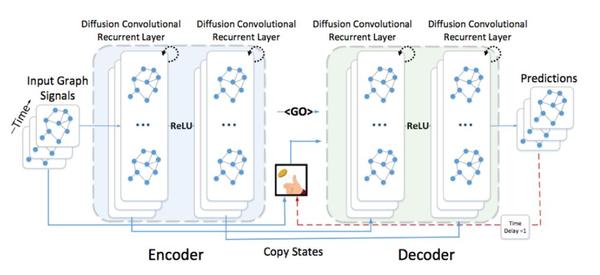
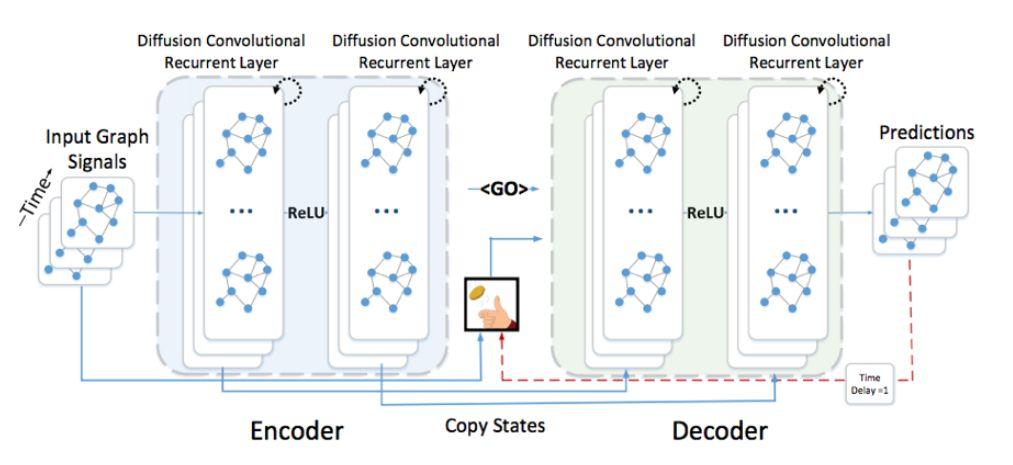
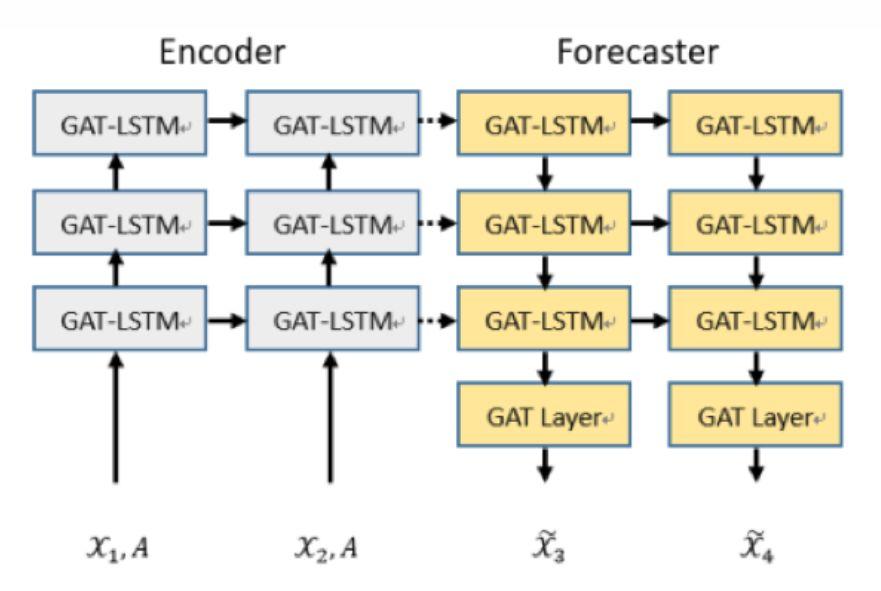
实际上该问题是一个seq2seq建模问题,因此我们可以使用常用的encoder-decoder框架,如图3.1
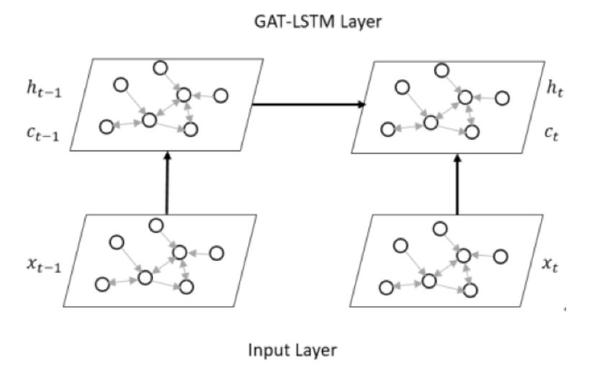
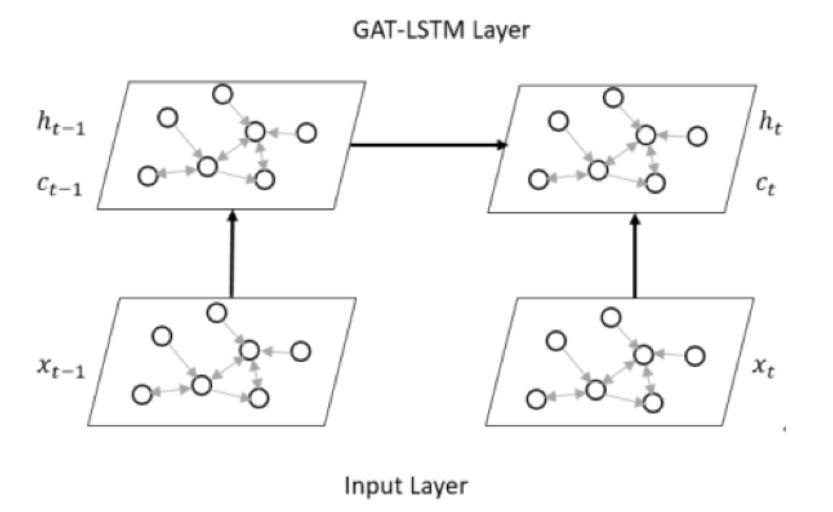
3.2GAT-LSTM
GAT-LSTM[2019]: Graph Attention LSTM
这篇论文是鄙人的一点小小贡献,和上面DCRNNs一样,只不过我将DCNNs换成更加强大的GATs。我解决的是城市路网的交通流预测,城市路网是有潮汐现象的,所以其实路网之前的权值是不固定的,应该是变化的,DCRNNs路网权值是固定的,是一个距离的函数。
GAT-LSTM公式如下:
\begin{aligned} i^{(t)} &=\sigma\left(g\left(X^{(t)} ; W_{x i}, a_{x i}\right)+g\left(H^{(t-1)} ; W_{h i}, a_{h i}\right)+b_{i}\right) \\ f^{(t)} &=\sigma\left(g\left(X^{(t)} ; W_{x f}, a_{x f}\right)+g\left(H^{(t-1)} ; W_{h f}, a_{h f}\right)+b_{f}\right) \\ o^{(t)} &=\sigma\left(g\left(X^{(t)} ; W_{x o}, a_{x o}\right)+g\left(H^{(t-1)} ; W_{h o}, a_{h o}\right)+b_{o}\right) \\ \mathcal{C}^{(t)} &=f^{(t)} \odot \mathcal{C}^{(t-1)}+i^{(t)} \odot \tanh \left(g\left(X^{(t)} ; W_{x c}, a_{x c}\right)+g\left(H^{(t)} ; W_{h c}, a_{h c}\right)+b_{c}\right) \\ \mathcal{H}^{(t)} &=o^{(t)} \odot \tanh \left(\mathcal{C}^{(t)}\right) \end{aligned}(3.5)
图3.2是GAT-LSTM变换的示意图,图3.3是我使用的encoder-forecaster框架,其中虚线代表状态拷贝,使用encoder-forecaster框架是基于如下考虑:
●编码-解码网络的解码器一般还需要输入,训练期间使用标准值,推断期间使用预测值;而编码预测
网络的预测网络是不需要额外输入的,这可以避免推断期间的误差传递
●编码-解码网络的编码器和解码器可以是完全不相关的模型,但是编码-预测网络的编码器与预测器是对称的,这是因为编码器中高层次的状态已经获得了全局的时空关系,可以指导和更新预测器低层状态

3.3.总结
基于Graph的序列建模研究的不多,目前主流方法是使用GCN改造RNN,是的模型可以同时获取Graph的空间相关性和时间相关性。
GNN应用简介
社交网络数据挖掘
社交广告(lookalike)/社区挖掘/link prediction
CV领域,尤其是3D
例如:基于人体骨架关键点的人类动作识别——ST-GCN(AAAI 2018)。
ST-GCN主要原理:
1. 在每一帧内部,按照人体的自然骨架连接关系构造空间图;
2. 在相邻两帧的相同关键点连接起来,构成时序边;
3. 所有输入帧中关键点构成节点集(node set),步骤 1、2 中的所有边构成边集(edge set),即构成所需的时空图。
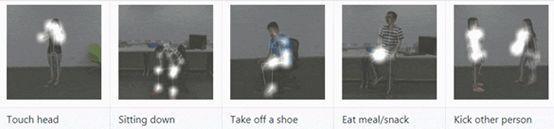
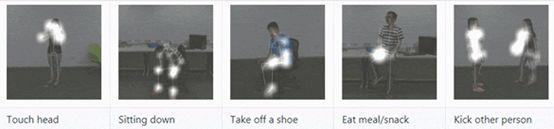
Image Captioning(ECCV 2018)
NLP
GNN在NLP应用不多,这里就整体在high level上简单介绍GNN的应用吧:
在20NG/ohsumed/R52和R8/MR测试,其中MR输于CNN域LSTM的方法,这可能因为词序对情感分类是一个不可不略的特征。
这也侧面反应了目前GCN与NLP融合的境况,忽略词序的任务可能比较适合,但是很多NLP任务都是seq相关的,这也是为什么2019年了GCN还在研究怎么文本分类...
一个可能的解法是使用LSTM进行encoding获得序列特征+GCN获取的非序列特征融合+Attention也许是处理NLP中序列建模的一个方向。
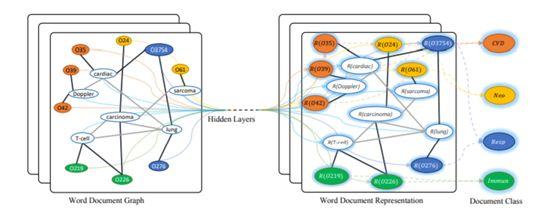
例如:文本分类(AAAI 2019)/Semantic Role Labeling(EMNLP 2017)
知识图谱
TransE:KG Embedding baseline, TransE是知识图谱embedding方法,基本思想是对于一个三元组(h,r,t) 其嵌入向量使得h+r-l = 0。衍生:TransH/TransR/TransD/TransE/TransA
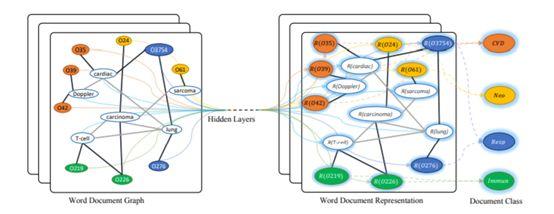
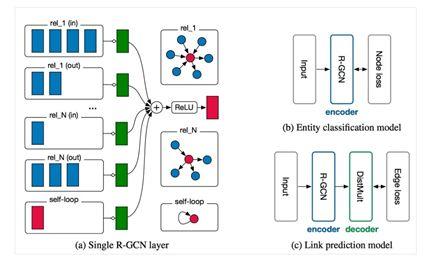
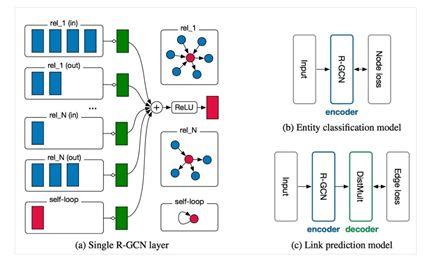
R-GCN:节点分类/link-prediction
Relational Graph Attention Networks(ICLR 2019 openreview)
R-GCN是第一次GCN引入知识图谱,时间节点在(2017年)。基本思路,每种relation搞一个L,link predicition基本思路是有一个打分函数,会对每个entity embedding和relation打分。负采样为负样本。
Zero-shotRecognitionvia Semantic Embeddings and Knowledge Graphs(基于语义嵌入和知识图谱零次识别)
Convolutional2DKnowledgeGraph Embeddings(卷积二维知识图谱嵌入)
生物制药
对于自然科学中物质结构的研究,例如:molecule generated with graph VAE
交通领域
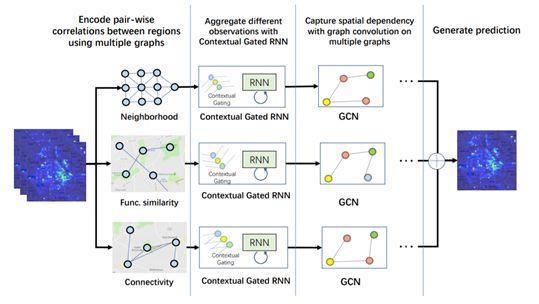
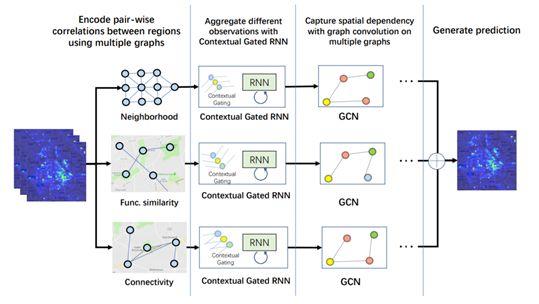
路况预测/ETA/滴滴供需预测(AAAI 2019)
基于图卷积路况预测的ETA深度模型
文章到此就算结束了,本文对当前主流的Graph神经网络进行了综述,最后总结一句话: 如果你的问题适合建模为Graph,那么你应该把80%的经历花在构图上,只要你的Graph足够准确,数据足够精确且丰富,那么你可以有一万种方法解决你的问题。
以上全当是抛砖引玉,希望对大家有所帮助。更多更详细的内容,可关注作者GitHub获取:
https:// github.com/talorwu/Grap h-Neural-Network-Review
相关文章:
1. “噪声对比估计”杂谈:曲径通幽之妙: https:// blog.csdn.net/c9yv2cf9i 06k2a9e/article/details/80731084
2. Facebook:广告领域定制化受众: http:// geek.csdn.net/news/deta il/200138
3. Tencent:微信朋友圈广告(Lookalike)策略: http://www. sohu.com/a/124091440_35 5140
4. 金融智能在蚂蚁金服的发展与应用: https://www. sohu.com/a/162168329_99 940985
5. Attention is all you need: https:// arxiv.org/abs/1706.0376 2
