相机参数类型可分为六类,除 command 参数外,每一类都有其对应的设置与获取函数接口。
表 1 参数类型及对应函数接口介绍
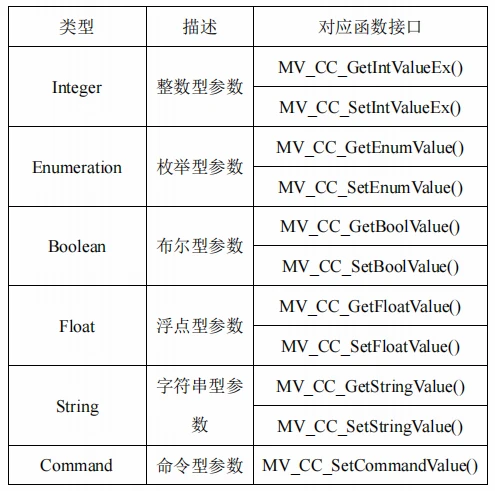
*详细函数接口可参考 SDK 手册:
C:\Program Files (x86)\MVS\Development\Documentations
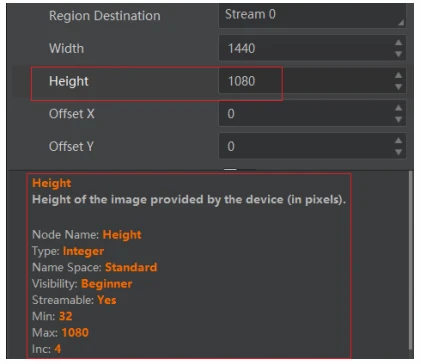
相机参数类型查询
对于相机的每一个参数,在 MVS 客户端中都可以找到相应的类型、节点名称、取值范围、步进等信息,从图 1 可以看出,相机高度节点名称为”Height”,节点类型”Integer”,取值范围 ”32-1080” , 步 进 值 为 4 。 通 过 节 点 类 型 我 们 可 以 看 出 , 应 该 使 用MV_CC_GetIntValueEx()获取参数值,使用 MV_CC_SetIntValueEx()设置参数值。其他参数用法类似。
常用参数设置获取示例
1) Integer 型参数设置与获取—以图像宽度获取设置为例
MVS 查看参数类型及节点名称

调用对应函数接口
//获取int型参数
MVCC_INTVALUE_EX struIntValue = { 0 };
nRet = MV_CC_GetIntValueEx(handle, "Width", &struIntValue);
if (MV_OK != nRet) { printf("Error: GetIntValue fail [%x]\n", nRet); }
//打印当前宽度的最大值、最小值、步进 printf("Width:%I64d,Width_Max:%I64d,Width_min:%I64d,Width_Inc:%I64d\n", struIntValue.nCurValue, struIntValue.nMax, struIntValue.nMin, struIntValue.nInc);
//设置int型参数
/* · value值必须是步进值(Inc)的整数倍,否则会失败 ·
宽度、高度等参数设置时,只有在MV_CC_OpenDevice之后,MV_CC_Startgrab接口调用前才能 设置,取流过程中,不能修改宽高
· 宽度、高度等参数设置时,若有Offset X、Y偏移,应当先调用相关接口,将偏移量置0 int64_t nValue = 1000;
nRet = MV_CC_SetIntValueEx(handle, "Width", nValue);
if (MV_OK != nRet) { printf("Error: SetIntValue fail [%x]\n", nRet); }
2) Command 型参数——以软触发设置为例
//设置Command型节点-发送软触发命令
//需要先打开【触发模式】,触发源选择【软触发】后才可以设置软触发命令
nRet = MV_CC_SetCommandValue(handle, "TriggerSoftware");
if (MV_OK != nRet)
{
printf("Error: SetCommandValue fail [%x]\n", nRet);
}
3) Float 型参数设置与获取—以曝光获取、设置为例
//曝光参数获取 MVCC_FLOATVALUE struFloatValue = { 0 };
nRet = MV_CC_GetFloatValue(handle, "ExposureTime", &struFloatValue);
if (MV_OK != nRet) printf("Error: GetFloatValue fail [%x]\n", nRet); }
//设置float型参数-曝光值
//设置曝光时,需要注意是否已经开启自动曝光、曝光模式,它们都会影响曝光参数的设置范围及是否可 以设置,可在MVS中进行观察
float fValue = 1000; nRet = MV_CC_SetFloatValue(handle, "ExposureTime", fValue);
if (MV_OK != nRet)
{
printf("Error: SetFloatValue fail [%x]\n", nRet);
}
4) Enumeration 型参数设置与获取—以相机图像格式获取、设置为例
MVS 查看参数类型及节点名称
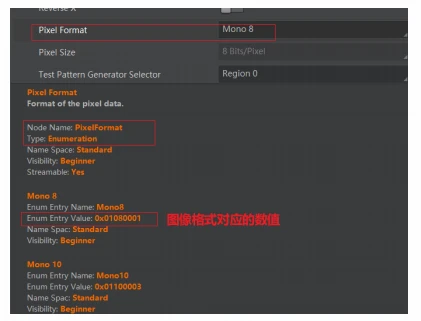
调用对应函数接口
//开启水印信息需要按照步骤,才能一步步进行操作
//只有在MV_CC_OpenDevice之后,MV_CC_Startgrab接口调用前才能设置水印信息
nRet = MV_CC_SetBoolValue(handle, "ChunkModeActive", 1);//开启水印模式
if (MV_OK != nRet)
{ printf("Error: ChunkModeActive fail! nRet [0x%x]\n", nRet); }
nRet = MV_CC_SetEnumValue(handle, "ChunkSelector", 6); //选择水印信息:触发计数
if (MV_OK != nRet)
{ printf("Error: ChunkSelector fail! nRet [0x%x]\n", nRet);; }
nRet = MV_CC_SetBoolValue(handle, "ChunkEnable", 1);//使能水印 if (MV_OK != nRet)
{
printf("Error: ChunkEnable fail! nRet [0x%x]\n", nRet);
}
5) String 参数获取与设置—用户名称
MVCC_STRINGVALUE struStringValue = { 0 };
nRet = MV_CC_GetStringValue(handle, "DeviceUserID", &struStringValue);
if (MV_OK != nRet)
{ printf("Error: GetStringValue fail [%x]\n", nRet);
}
printf("DeviceUserID:[%s]\n", struStringValue.chCurValue);
//设置string型参数-自定义用户名称 //只有在MV_CC_OpenDevice之后,MV_CC_Startgrab
//接口调用前才能设置用户ID
nRet = MV_CC_SetStringValue(handle, "DeviceUserID", "HikrobotCamera");
if (MV_OK != nRet)
{ printf("Error: SetStringValue fail [%x]\n", nRet); }
6) Boolean 参数设置—触发计数水印信息获取
MVS 查看参数类型及节点名称
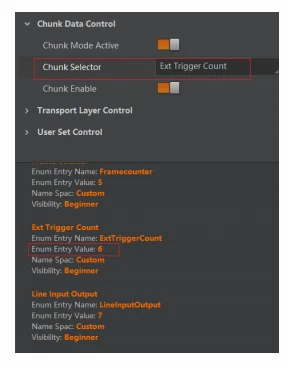
调用对应函数接口
//开启水印信息需要按照步骤,才能一步步进行操作
//只有在MV_CC_OpenDevice之后,MV_CC_Startgrab接口调用前才能设置水印信息
nRet = MV_CC_SetBoolValue(handle, "ChunkModeActive", 1);
//开启水印模式
if (MV_OK != nRet)
{ printf("Error: ChunkModeActive fail! nRet [0x%x]\n", nRet);
}
nRet = MV_CC_SetEnumValue(handle, "ChunkSelector", 6);
//选择水印信息:触发计数
if (MV_OK != nRet)
{
printf("Error: ChunkSelector fail! nRet [0x%x]\n", nRet);
}
nRet = MV_CC_SetBoolValue(handle, "ChunkEnable", 1);
//使能水印
if (MV_OK != nRet)
{ printf("Error: ChunkEnable fail! nRet [0x%x]\n", nRet); }